SExtractor Photometry of MACS 0717#
This TA class note is based on Jeong Hwan Lee’s TAO-2022 TA class note.
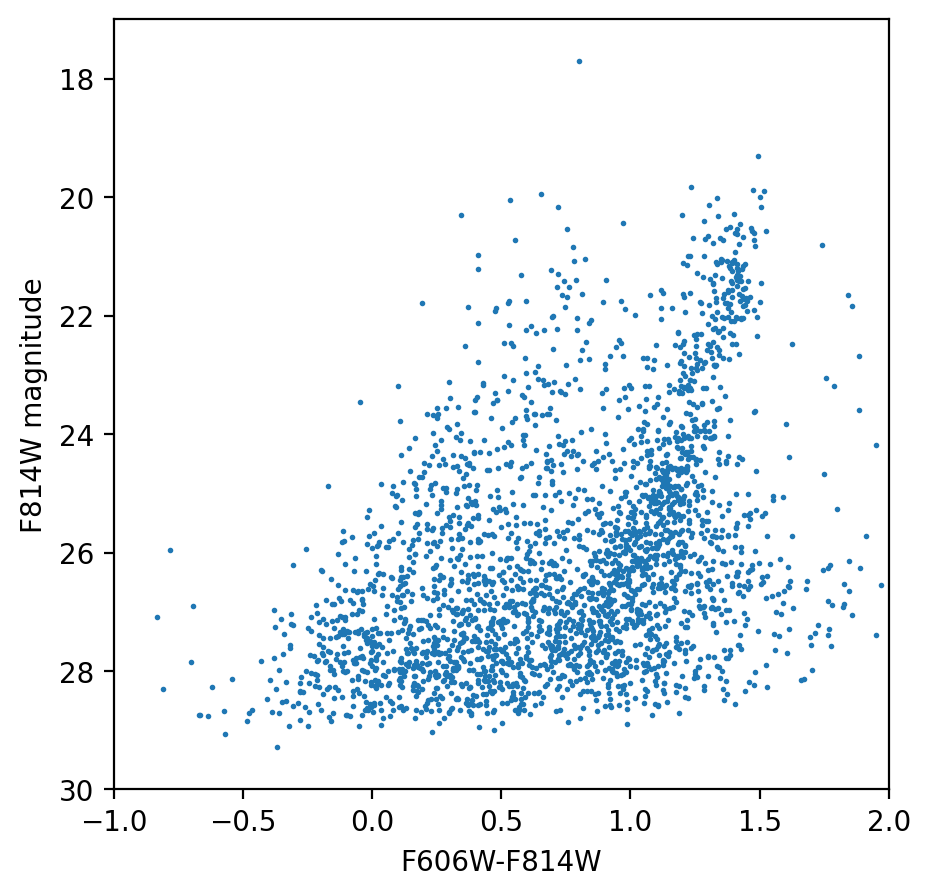
Purpose of this exercise: Let’s find sources in the images and plot a color-magnitude diagram
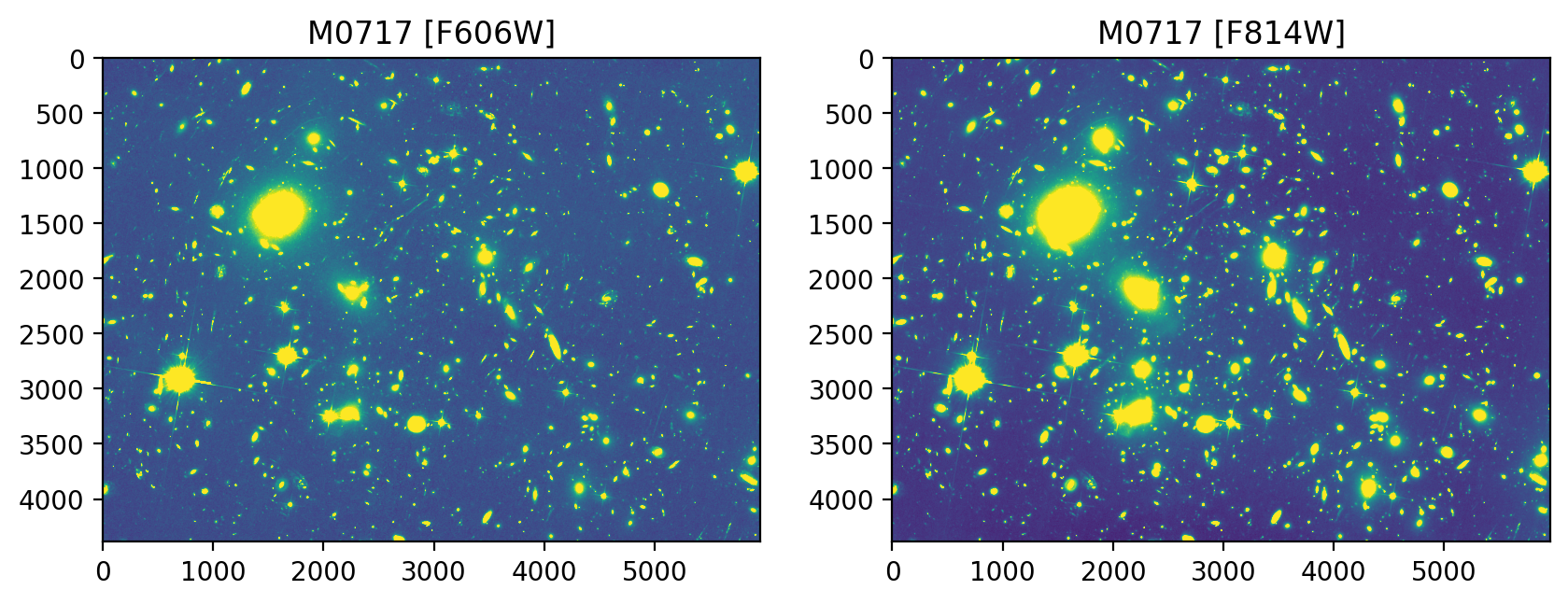
Example galaxy cluster: \(\color{blue}{\text{MACS J0717.5+3745}}\) (z=0.545)
Filters: HST/ACS F606W(V) and F814W(I)
There are two FITS images: M0717_F606W.fits, M0717_F814W.fits
Process: Extract sources → classify stars & galaxies → draw color-magnitude diagrams of the galaxies
- What is Source Extractor (SExtractor)?#
A program for automated detection and photometry of sources in FITS image files (Bertin & Arnouts 1996)
Specialized for reduction of large-scale galaxy survey data but can perform reasonably well on moderately crowded star fields.
Manuals:
User’s Manual ver.2.13 - E. Bertin (difficult to follow for beginners)
SExtractor for Dummies - B. Holwerda (a friendlier version)
- Running SExtractor#
Input files: FITS image, configuration file, parameter file
Output files: source catalog, FITS check images
running command: sextractor \(\color{blue}{\text{[FITS image]}}\) -c \(\color{red}{\text{[configuration file]}}\) -[output parameter1][value1] -[output parameter2][value2] …
Ex) sextractor \(\color{blue}{\text{M0717\_F814W.fits}}\) -c \(\color{red}{\text{config.txt}}\) -CATALOG_NAME 814.cat (…)
- Input parameters#
\(\color{blue}{\textbf{FITS image:}}\) single extension or multi-extension
\(\color{red}{\textbf{Configuration file:}}\) list of parameters and their values given by the user
example is given by ‘/usr/share/sextractor/default.sex’ (it is a default configuration file)
Catalog:
CATALOG_NAME: name of the output catalog (*.cat)
PARAMETERS_NAME: name of the file containing catalog contents (*.param)
Extraction:
DETECT_MINAREA: min. # of pixels above threshold → 5(default)
DETECT_THRESH: 1.5\(\sigma\) (default)
ANALYSIS_THRESH: 1.5\(\sigma\) (usually same as DETECT_THRESH)
Photometry:
SATUR_LEVEL: pixel level above which it is considered saturated
MAG_ZEROPOINT: magnitude zero point
GAIN: effective gain [e-/ADU] (only affects the magnitude error)
PIXEL_SCALE: [arcsec/pixel]
Star/Galaxy Separation:
SEEING_FWHM: FWHM of stars in arcsec (use DAOPHOT/imexam to estimate)
Background:
BACK_SIZE: set size of background mesh for background estimation [pixels]
Check Image:
CHECKIMAGE_TYPE: types of check images to output (recommended: APERTURES)
CHECKIMAGE_NAME: names of check images
\(\textbf{Parameter file:}\) list of parameters to extract to output catalog
check ‘/usr/share/sextractor/default.param’ for explanations of each parameter (total 400 parameters)
one column consisting of the parameter names X_IMAGE Y_IMAGE NUMBER MAG_AUTO MAGERR_AUTO …
# read default configuration file: '/usr/share/sextractor/default.sex'
SEXDIR = '/opt/homebrew/opt/sextractor/share/sextractor/' # put the path to your sextractor directory here
for line in open(SEXDIR+'default.sex', 'r').readlines():
line = line.strip()
print(line)
# Default configuration file for SExtractor 2.12.4
# EB 2010-10-10
#
#-------------------------------- Catalog ------------------------------------
CATALOG_NAME test.cat # name of the output catalog
CATALOG_TYPE ASCII_HEAD # NONE,ASCII,ASCII_HEAD, ASCII_SKYCAT,
# ASCII_VOTABLE, FITS_1.0 or FITS_LDAC
PARAMETERS_NAME default.param # name of the file containing catalog contents
#------------------------------- Extraction ----------------------------------
DETECT_TYPE CCD # CCD (linear) or PHOTO (with gamma correction)
DETECT_MINAREA 3 # min. # of pixels above threshold
DETECT_THRESH 1.5 # <sigmas> or <threshold>,<ZP> in mag.arcsec-2
ANALYSIS_THRESH 1.5 # <sigmas> or <threshold>,<ZP> in mag.arcsec-2
FILTER Y # apply filter for detection (Y or N)?
FILTER_NAME default.conv # name of the file containing the filter
DEBLEND_NTHRESH 32 # Number of deblending sub-thresholds
DEBLEND_MINCONT 0.005 # Minimum contrast parameter for deblending
CLEAN Y # Clean spurious detections? (Y or N)?
CLEAN_PARAM 1.0 # Cleaning efficiency
#-------------------------------- WEIGHTing ----------------------------------
WEIGHT_TYPE NONE # type of WEIGHTing: NONE, BACKGROUND,
# MAP_RMS, MAP_VAR or MAP_WEIGHT
WEIGHT_IMAGE weight.fits # weight-map filename
#-------------------------------- FLAGging -----------------------------------
FLAG_IMAGE flag.fits # filename for an input FLAG-image
FLAG_TYPE OR # flag pixel combination: OR, AND, MIN, MAX
# or MOST
#------------------------------ Photometry -----------------------------------
PHOT_APERTURES 5 # MAG_APER aperture diameter(s) in pixels
PHOT_AUTOPARAMS 2.5, 3.5 # MAG_AUTO parameters: <Kron_fact>,<min_radius>
PHOT_PETROPARAMS 2.0, 3.5 # MAG_PETRO parameters: <Petrosian_fact>,
# <min_radius>
PHOT_AUTOAPERS 0.0,0.0 # <estimation>,<measurement> minimum apertures
# for MAG_AUTO and MAG_PETRO
SATUR_LEVEL 50000.0 # level (in ADUs) at which arises saturation
SATUR_KEY SATURATE # keyword for saturation level (in ADUs)
MAG_ZEROPOINT 0.0 # magnitude zero-point
MAG_GAMMA 4.0 # gamma of emulsion (for photographic scans)
GAIN 0.0 # detector gain in e-/ADU
GAIN_KEY GAIN # keyword for detector gain in e-/ADU
PIXEL_SCALE 1.0 # size of pixel in arcsec (0=use FITS WCS info)
#------------------------- Star/Galaxy Separation ----------------------------
SEEING_FWHM 1.2 # stellar FWHM in arcsec
STARNNW_NAME default.nnw # Neural-Network_Weight table filename
#------------------------------ Background -----------------------------------
BACK_TYPE AUTO # AUTO or MANUAL
BACK_VALUE 0.0 # Default background value in MANUAL mode
BACK_SIZE 64 # Background mesh: <size> or <width>,<height>
BACK_FILTERSIZE 3 # Background filter: <size> or <width>,<height>
#------------------------------ Check Image ----------------------------------
CHECKIMAGE_TYPE NONE # can be NONE, BACKGROUND, BACKGROUND_RMS,
# MINIBACKGROUND, MINIBACK_RMS, -BACKGROUND,
# FILTERED, OBJECTS, -OBJECTS, SEGMENTATION,
# or APERTURES
CHECKIMAGE_NAME check.fits # Filename for the check-image
#--------------------- Memory (change with caution!) -------------------------
MEMORY_OBJSTACK 3000 # number of objects in stack
MEMORY_PIXSTACK 300000 # number of pixels in stack
MEMORY_BUFSIZE 1024 # number of lines in buffer
#------------------------------- ASSOCiation ---------------------------------
ASSOC_NAME sky.list # name of the ASCII file to ASSOCiate
ASSOC_DATA 2,3,4 # columns of the data to replicate (0=all)
ASSOC_PARAMS 2,3,4 # columns of xpos,ypos[,mag]
ASSOC_RADIUS 2.0 # cross-matching radius (pixels)
ASSOC_TYPE NEAREST # ASSOCiation method: FIRST, NEAREST, MEAN,
# MAG_MEAN, SUM, MAG_SUM, MIN or MAX
ASSOCSELEC_TYPE MATCHED # ASSOC selection type: ALL, MATCHED or -MATCHED
#----------------------------- Miscellaneous ---------------------------------
VERBOSE_TYPE NORMAL # can be QUIET, NORMAL or FULL
HEADER_SUFFIX .head # Filename extension for additional headers
WRITE_XML N # Write XML file (Y/N)?
XML_NAME sex.xml # Filename for XML output
XSL_URL file:///usr/local/share/sextractor/sextractor.xsl
# Filename for XSL style-sheet
# read parameter list file: '/usr/share/sextractor/default.param'
SEXDIR = '/opt/homebrew/opt/sextractor/share/sextractor/' # put the path to your sextractor directory here
for line in open(SEXDIR+'default.param', 'r').readlines():
line = line.strip()
print(line)
#NUMBER Running object number
#EXT_NUMBER FITS extension number
#FLUX_ISO Isophotal flux [count]
#FLUXERR_ISO RMS error for isophotal flux [count]
#MAG_ISO Isophotal magnitude [mag]
#MAGERR_ISO RMS error for isophotal magnitude [mag]
#FLUX_ISOCOR Corrected isophotal flux [count]
#FLUXERR_ISOCOR RMS error for corrected isophotal flux [count]
#MAG_ISOCOR Corrected isophotal magnitude [mag]
#MAGERR_ISOCOR RMS error for corrected isophotal magnitude [mag]
#FLUX_APER Flux vector within fixed circular aperture(s) [count]
#FLUXERR_APER RMS error vector for aperture flux(es) [count]
#MAG_APER Fixed aperture magnitude vector [mag]
#MAGERR_APER RMS error vector for fixed aperture mag. [mag]
#FLUX_AUTO Flux within a Kron-like elliptical aperture [count]
#FLUXERR_AUTO RMS error for AUTO flux [count]
#MAG_AUTO Kron-like elliptical aperture magnitude [mag]
#MAGERR_AUTO RMS error for AUTO magnitude [mag]
#FLUX_PETRO Flux within a Petrosian-like elliptical aperture [count]
#FLUXERR_PETRO RMS error for PETROsian flux [count]
#MAG_PETRO Petrosian-like elliptical aperture magnitude [mag]
#MAGERR_PETRO RMS error for PETROsian magnitude [mag]
#FLUX_BEST Best of FLUX_AUTO and FLUX_ISOCOR [count]
#FLUXERR_BEST RMS error for BEST flux [count]
#MAG_BEST Best of MAG_AUTO and MAG_ISOCOR [mag]
#MAGERR_BEST RMS error for MAG_BEST [mag]
#FLUX_WIN Gaussian-weighted flux [count]
#FLUXERR_WIN RMS error for WIN flux [count]
#MAG_WIN Gaussian-weighted magnitude [mag]
#MAGERR_WIN RMS error for MAG_WIN [mag]
#FLUX_SOMFIT Flux derived from SOM fit [count]
#FLUXERR_SOMFIT RMS error for SOMFIT flux [count]
#MAG_SOMFIT Magnitude derived from SOM fit [mag]
#MAGERR_SOMFIT Magnitude error derived from SOM fit [mag]
#ERROR_SOMFIT Reduced Chi-square error of the SOM fit
#VECTOR_SOMFIT Position vector of the winning SOM node
#KRON_RADIUS Kron apertures in units of A or B
#PETRO_RADIUS Petrosian apertures in units of A or B
#BACKGROUND Background at centroid position [count]
#THRESHOLD Detection threshold above background [count]
#FLUX_MAX Peak flux above background [count]
#ISOAREA_IMAGE Isophotal area above Analysis threshold [pixel**2]
#ISOAREAF_IMAGE Isophotal area (filtered) above Detection threshold [pixel**2]
#XMIN_IMAGE Minimum x-coordinate among detected pixels [pixel]
#YMIN_IMAGE Minimum y-coordinate among detected pixels [pixel]
#XMAX_IMAGE Maximum x-coordinate among detected pixels [pixel]
#YMAX_IMAGE Maximum y-coordinate among detected pixels [pixel]
#XPEAK_IMAGE x-coordinate of the brightest pixel [pixel]
#YPEAK_IMAGE y-coordinate of the brightest pixel [pixel]
#XPEAK_FOCAL Focal-plane x coordinate of the brightest pixel
#YPEAK_FOCAL Focal-plane y coordinate of the brightest pixel
#XPEAK_WORLD World-x coordinate of the brightest pixel [deg]
#YPEAK_WORLD World-y coordinate of the brightest pixel [deg]
#ALPHAPEAK_SKY Right ascension of brightest pix (native) [deg]
#DELTAPEAK_SKY Declination of brightest pix (native) [deg]
#ALPHAPEAK_J2000 Right ascension of brightest pix (J2000) [deg]
#DELTAPEAK_J2000 Declination of brightest pix (J2000) [deg]
#ALPHAPEAK_B1950 Right ascension of brightest pix (B1950) [deg]
#DELTAPEAK_B1950 Declination of brightest pix (B1950) [deg]
#X_IMAGE Object position along x [pixel]
#Y_IMAGE Object position along y [pixel]
#X_IMAGE_DBL Object position along x (double precision) [pixel]
#Y_IMAGE_DBL Object position along y (double precision) [pixel]
#X_FOCAL Barycenter position along focal-plane x axis
#Y_FOCAL Barycenter position along focal-plane y axis
#X_WORLD Barycenter position along world x axis [deg]
#Y_WORLD Barycenter position along world y axis [deg]
#X_MAMA Barycenter position along MAMA x axis [m**(-6)]
#Y_MAMA Barycenter position along MAMA y axis [m**(-6)]
#ALPHA_SKY Right ascension of barycenter (native) [deg]
#DELTA_SKY Declination of barycenter (native) [deg]
#ALPHA_J2000 Right ascension of barycenter (J2000) [deg]
#DELTA_J2000 Declination of barycenter (J2000) [deg]
#ALPHA_B1950 Right ascension of barycenter (B1950) [deg]
#DELTA_B1950 Declination of barycenter (B1950) [deg]
#X2_IMAGE Variance along x [pixel**2]
#Y2_IMAGE Variance along y [pixel**2]
#XY_IMAGE Covariance between x and y [pixel**2]
#X2_WORLD Variance along X-WORLD (alpha) [deg**2]
#Y2_WORLD Variance along Y-WORLD (delta) [deg**2]
#XY_WORLD Covariance between X-WORLD and Y-WORLD [deg**2]
#CXX_IMAGE Cxx object ellipse parameter [pixel**(-2)]
#CYY_IMAGE Cyy object ellipse parameter [pixel**(-2)]
#CXY_IMAGE Cxy object ellipse parameter [pixel**(-2)]
#CXX_WORLD Cxx object ellipse parameter (WORLD units) [deg**(-2)]
#CYY_WORLD Cyy object ellipse parameter (WORLD units) [deg**(-2)]
#CXY_WORLD Cxy object ellipse parameter (WORLD units) [deg**(-2)]
#A_IMAGE Profile RMS along major axis [pixel]
#B_IMAGE Profile RMS along minor axis [pixel]
#THETA_IMAGE Position angle (CCW/x) [deg]
#A_WORLD Profile RMS along major axis (world units) [deg]
#B_WORLD Profile RMS along minor axis (world units) [deg]
#THETA_WORLD Position angle (CCW/world-x) [deg]
#THETA_SKY Position angle (east of north) (native) [deg]
#THETA_J2000 Position angle (east of north) (J2000) [deg]
#THETA_B1950 Position angle (east of north) (B1950) [deg]
#ERRX2_IMAGE Variance of position along x [pixel**2]
#ERRY2_IMAGE Variance of position along y [pixel**2]
#ERRXY_IMAGE Covariance of position between x and y [pixel**2]
#ERRX2_WORLD Variance of position along X-WORLD (alpha) [deg**2]
#ERRY2_WORLD Variance of position along Y-WORLD (delta) [deg**2]
#ERRXY_WORLD Covariance of position X-WORLD/Y-WORLD [deg**2]
#ERRCXX_IMAGE Cxx error ellipse parameter [pixel**(-2)]
#ERRCYY_IMAGE Cyy error ellipse parameter [pixel**(-2)]
#ERRCXY_IMAGE Cxy error ellipse parameter [pixel**(-2)]
#ERRCXX_WORLD Cxx error ellipse parameter (WORLD units) [deg**(-2)]
#ERRCYY_WORLD Cyy error ellipse parameter (WORLD units) [deg**(-2)]
#ERRCXY_WORLD Cxy error ellipse parameter (WORLD units) [deg**(-2)]
#ERRA_IMAGE RMS position error along major axis [pixel]
#ERRB_IMAGE RMS position error along minor axis [pixel]
#ERRTHETA_IMAGE Error ellipse position angle (CCW/x) [deg]
#ERRA_WORLD World RMS position error along major axis [deg]
#ERRB_WORLD World RMS position error along minor axis [deg]
#ERRTHETA_WORLD Error ellipse pos. angle (CCW/world-x) [deg]
#ERRTHETA_SKY Native error ellipse pos. angle (east of north) [deg]
#ERRTHETA_J2000 J2000 error ellipse pos. angle (east of north) [deg]
#ERRTHETA_B1950 B1950 error ellipse pos. angle (east of north) [deg]
#XWIN_IMAGE Windowed position estimate along x [pixel]
#YWIN_IMAGE Windowed position estimate along y [pixel]
#XWIN_FOCAL Windowed position along focal-plane x axis
#YWIN_FOCAL Windowed position along focal-plane y axis
#XWIN_WORLD Windowed position along world x axis [deg]
#YWIN_WORLD Windowed position along world y axis [deg]
#ALPHAWIN_SKY Windowed right ascension (native) [deg]
#DELTAWIN_SKY Windowed declination (native) [deg]
#ALPHAWIN_J2000 Windowed right ascension (J2000) [deg]
#DELTAWIN_J2000 windowed declination (J2000) [deg]
#ALPHAWIN_B1950 Windowed right ascension (B1950) [deg]
#DELTAWIN_B1950 Windowed declination (B1950) [deg]
#X2WIN_IMAGE Windowed variance along x [pixel**2]
#Y2WIN_IMAGE Windowed variance along y [pixel**2]
#XYWIN_IMAGE Windowed covariance between x and y [pixel**2]
#X2WIN_WORLD Windowed variance along X-WORLD (alpha) [deg**2]
#Y2WIN_WORLD Windowed variance along Y-WORLD (delta) [deg**2]
#XYWIN_WORLD Windowed covariance between X-WORLD and Y-WORLD [deg**2]
#CXXWIN_IMAGE Windowed Cxx object ellipse parameter [pixel**(-2)]
#CYYWIN_IMAGE Windowed Cyy object ellipse parameter [pixel**(-2)]
#CXYWIN_IMAGE Windowed Cxy object ellipse parameter [pixel**(-2)]
#CXXWIN_WORLD Windowed Cxx object ellipse parameter (WORLD units) [deg**(-2)]
#CYYWIN_WORLD Windowed Cyy object ellipse parameter (WORLD units) [deg**(-2)]
#CXYWIN_WORLD Windowed Cxy object ellipse parameter (WORLD units) [deg**(-2)]
#AWIN_IMAGE Windowed profile RMS along major axis [pixel]
#BWIN_IMAGE Windowed profile RMS along minor axis [pixel]
#THETAWIN_IMAGE Windowed position angle (CCW/x) [deg]
#AWIN_WORLD Windowed profile RMS along major axis (world units) [deg]
#BWIN_WORLD Windowed profile RMS along minor axis (world units) [deg]
#THETAWIN_WORLD Windowed position angle (CCW/world-x) [deg]
#THETAWIN_SKY Windowed position angle (east of north) (native) [deg]
#THETAWIN_J2000 Windowed position angle (east of north) (J2000) [deg]
#THETAWIN_B1950 Windowed position angle (east of north) (B1950) [deg]
#ERRX2WIN_IMAGE Variance of windowed pos along x [pixel**2]
#ERRY2WIN_IMAGE Variance of windowed pos along y [pixel**2]
#ERRXYWIN_IMAGE Covariance of windowed pos between x and y [pixel**2]
#ERRX2WIN_WORLD Variance of windowed pos along X-WORLD (alpha) [deg**2]
#ERRY2WIN_WORLD Variance of windowed pos along Y-WORLD (delta) [deg**2]
#ERRXYWIN_WORLD Covariance of windowed pos X-WORLD/Y-WORLD [deg**2]
#ERRCXXWIN_IMAGE Cxx windowed error ellipse parameter [pixel**(-2)]
#ERRCYYWIN_IMAGE Cyy windowed error ellipse parameter [pixel**(-2)]
#ERRCXYWIN_IMAGE Cxy windowed error ellipse parameter [pixel**(-2)]
#ERRCXXWIN_WORLD Cxx windowed error ellipse parameter (WORLD units) [deg**(-2)]
#ERRCYYWIN_WORLD Cyy windowed error ellipse parameter (WORLD units) [deg**(-2)]
#ERRCXYWIN_WORLD Cxy windowed error ellipse parameter (WORLD units) [deg**(-2)]
#ERRAWIN_IMAGE RMS windowed pos error along major axis [pixel]
#ERRBWIN_IMAGE RMS windowed pos error along minor axis [pixel]
#ERRTHETAWIN_IMAGE Windowed error ellipse pos angle (CCW/x) [deg]
#ERRAWIN_WORLD World RMS windowed pos error along major axis [deg]
#ERRBWIN_WORLD World RMS windowed pos error along minor axis [deg]
#ERRTHETAWIN_WORLD Windowed error ellipse pos. angle (CCW/world-x) [deg]
#ERRTHETAWIN_SKY Native windowed error ellipse pos. angle (east of north) [deg]
#ERRTHETAWIN_J2000 J2000 windowed error ellipse pos. angle (east of north) [deg]
#ERRTHETAWIN_B1950 B1950 windowed error ellipse pos. angle (east of north) [deg]
#NITER_WIN Number of iterations for WIN centering
#MU_THRESHOLD Detection threshold above background [mag * arcsec**(-2)]
#MU_MAX Peak surface brightness above background [mag * arcsec**(-2)]
#ISOAREA_WORLD Isophotal area above Analysis threshold [deg**2]
#ISOAREAF_WORLD Isophotal area (filtered) above Detection threshold [deg**2]
#ISO0 Isophotal area at level 0 [pixel**2]
#ISO1 Isophotal area at level 1 [pixel**2]
#ISO2 Isophotal area at level 2 [pixel**2]
#ISO3 Isophotal area at level 3 [pixel**2]
#ISO4 Isophotal area at level 4 [pixel**2]
#ISO5 Isophotal area at level 5 [pixel**2]
#ISO6 Isophotal area at level 6 [pixel**2]
#ISO7 Isophotal area at level 7 [pixel**2]
#FLAGS Extraction flags
#FLAGS_WEIGHT Weighted extraction flags
#FLAGS_WIN Flags for WINdowed parameters
#IMAFLAGS_ISO FLAG-image flags OR'ed over the iso. profile
#NIMAFLAGS_ISO Number of flagged pixels entering IMAFLAGS_ISO
#NLOWWEIGHT_ISO Nb of pixels with low weight over the iso. profile
#NLOWDWEIGHT_ISO Nb of pixels with low det. weight over the iso. profile
#FWHM_IMAGE FWHM assuming a gaussian core [pixel]
#FWHM_WORLD FWHM assuming a gaussian core [deg]
#ELONGATION A_IMAGE/B_IMAGE
#ELLIPTICITY 1 - B_IMAGE/A_IMAGE
#POLAR_IMAGE (A_IMAGE^2 - B_IMAGE^2)/(A_IMAGE^2 + B_IMAGE^2)
#POLAR_WORLD (A_WORLD^2 - B_WORLD^2)/(A_WORLD^2 + B_WORLD^2)
#POLARWIN_IMAGE (AWIN^2 - BWIN^2)/(AWIN^2 + BWIN^2)
#POLARWIN_WORLD (AWIN^2 - BWIN^2)/(AWIN^2 + BWIN^2)
#CLASS_STAR S/G classifier output
#VIGNET Pixel data around detection [count]
#VIGNET_SHIFT Pixel data around detection, corrected for shift [count]
#VECTOR_ASSOC ASSOCiated parameter vector
#NUMBER_ASSOC Number of ASSOCiated IDs
#THRESHOLDMAX Maximum threshold possible for detection [count]
#FLUX_GROWTH Cumulated growth-curve [count]
#FLUX_GROWTHSTEP Step for growth-curves [pixel]
#MAG_GROWTH Cumulated magnitude growth-curve [mag]
#MAG_GROWTHSTEP Step for growth-curves [pixel]
#FLUX_RADIUS Fraction-of-light radii [pixel]
#XPSF_IMAGE X coordinate from PSF-fitting [pixel]
#YPSF_IMAGE Y coordinate from PSF-fitting [pixel]
#XPSF_WORLD PSF position along world x axis [deg]
#YPSF_WORLD PSF position along world y axis [deg]
#ALPHAPSF_SKY Right ascension of the fitted PSF (native) [deg]
#DELTAPSF_SKY Declination of the fitted PSF (native) [deg]
#ALPHAPSF_J2000 Right ascension of the fitted PSF (J2000) [deg]
#DELTAPSF_J2000 Declination of the fitted PSF (J2000) [deg]
#ALPHAPSF_B1950 Right ascension of the fitted PSF (B1950) [deg]
#DELTAPSF_B1950 Declination of the fitted PSF (B1950) [deg]
#FLUX_PSF Flux from PSF-fitting [count]
#FLUXERR_PSF RMS flux error for PSF-fitting [count]
#MAG_PSF Magnitude from PSF-fitting [mag]
#MAGERR_PSF RMS magnitude error from PSF-fitting [mag]
#NITER_PSF Number of iterations for PSF-fitting
#CHI2_PSF Reduced chi2 from PSF-fitting
#ERRX2PSF_IMAGE Variance of PSF position along x [pixel**2]
#ERRY2PSF_IMAGE Variance of PSF position along y [pixel**2]
#ERRXYPSF_IMAGE Covariance of PSF position between x and y [pixel**2]
#ERRX2PSF_WORLD Variance of PSF position along X-WORLD (alpha) [deg**2]
#ERRY2PSF_WORLD Variance of PSF position along Y-WORLD (delta) [deg**2]
#ERRXYPSF_WORLD Covariance of PSF position X-WORLD/Y-WORLD [deg**2]
#ERRCXXPSF_IMAGE Cxx PSF error ellipse parameter [pixel**(-2)]
#ERRCYYPSF_IMAGE Cyy PSF error ellipse parameter [pixel**(-2)]
#ERRCXYPSF_IMAGE Cxy PSF error ellipse parameter [pixel**(-2)]
#ERRCXXPSF_WORLD Cxx PSF error ellipse parameter (WORLD units) [deg**(-2)]
#ERRCYYPSF_WORLD Cyy PSF error ellipse parameter (WORLD units) [deg**(-2)]
#ERRCXYPSF_WORLD Cxy PSF error ellipse parameter (WORLD units) [deg**(-2)]
#ERRAPSF_IMAGE PSF RMS position error along major axis [pixel]
#ERRBPSF_IMAGE PSF RMS position error along minor axis [pixel]
#ERRTHETAPSF_IMAGE PSF error ellipse position angle (CCW/x) [deg]
#ERRAPSF_WORLD World PSF RMS position error along major axis [pixel]
#ERRBPSF_WORLD World PSF RMS position error along minor axis [pixel]
#ERRTHETAPSF_WORLD PSF error ellipse pos. angle (CCW/world-x) [deg]
#ERRTHETAPSF_SKY Native PSF error ellipse pos. angle (east of north) [deg]
#ERRTHETAPSF_J2000 J2000 PSF error ellipse pos. angle (east of north) [deg]
#ERRTHETAPSF_B1950 B1950 PSF error ellipse pos. angle (east of north) [deg]
#DURATION_ANALYSIS Duration of analysis for this source [s]
#VECTOR_MODEL Model-fitting coefficients
#VECTOR_MODELERR Model-fitting coefficient uncertainties
#MATRIX_MODELERR Model-fitting covariance matrix
#CHI2_MODEL Reduced Chi2 of the fit
#FLAGS_MODEL Model-fitting flags
#NITER_MODEL Number of iterations for model-fitting
#FLUX_MODEL Flux from model-fitting [count]
#FLUXERR_MODEL RMS error on model-fitting flux [count]
#MAG_MODEL Magnitude from model-fitting [mag]
#MAGERR_MODEL RMS error on model-fitting magnitude [mag]
#FLUX_MAX_MODEL Peak model flux above background [count]
#FLUX_EFF_MODEL Effective model flux above background [count]
#FLUX_MEAN_MODEL Mean effective model flux above background [count]
#MU_MAX_MODEL Peak model surface brightness above background [mag * arcsec**(-2)]
#MU_EFF_MODEL Effective model surface brightness above background [mag * arcsec**(-2)]
#MU_MEAN_MODEL Mean effective model surface brightness above background [mag * arcsec**(-2)]
#XMODEL_IMAGE X coordinate from model-fitting [pixel]
#YMODEL_IMAGE Y coordinate from model-fitting [pixel]
#XFOCAL_WORLD Fitted position along focal-plane x axis
#YFOCAL_WORLD Fitted position along focal-plane y axis
#XMODEL_WORLD Fitted position along world x axis [deg]
#YMODEL_WORLD Fitted position along world y axis [deg]
#ALPHAMODEL_SKY Fitted position along right ascension (native) [deg]
#DELTAMODEL_SKY Fitted position along declination (native) [deg]
#ALPHAMODEL_J2000 Fitted position along right ascension (J2000) [deg]
#DELTAMODEL_J2000 Fitted position along declination (J2000) [deg]
#ALPHAMODEL_B1950 Fitted position along right ascension (B1950) [deg]
#DELTAMODEL_B1950 Fitted position along declination (B1950) [deg]
#ERRX2MODEL_IMAGE Variance of fitted position along x [pixel**2]
#ERRY2MODEL_IMAGE Variance of fitted position along y [pixel**2]
#ERRXYMODEL_IMAGE Covariance of fitted position between x and y [pixel**2]
#ERRX2MODEL_WORLD Variance of fitted position along X-WORLD (alpha) [deg**2]
#ERRY2MODEL_WORLD Variance of fitted position along Y-WORLD (delta) [deg**2]
#ERRXYMODEL_WORLD Covariance of fitted position X-WORLD/Y-WORLD [deg**2]
#ERRCXXMODEL_IMAGE Cxx error ellipse parameter of fitted position [pixel**(-2)]
#ERRCYYMODEL_IMAGE Cyy error ellipse parameter of fitted position [pixel**(-2)]
#ERRCXYMODEL_IMAGE Cxy error ellipse parameter of fitted position [pixel**(-2)]
#ERRCXXMODEL_WORLD Cxx fitted error ellipse parameter (WORLD units) [deg**(-2)]
#ERRCYYMODEL_WORLD Cyy fitted error ellipse parameter (WORLD units) [deg**(-2)]
#ERRCXYMODEL_WORLD Cxy fitted error ellipse parameter (WORLD units) [deg**(-2)]
#ERRAMODEL_IMAGE RMS error of fitted position along major axis [pixel]
#ERRBMODEL_IMAGE RMS error of fitted position along minor axis [pixel]
#ERRTHETAMODEL_IMAGE Error ellipse pos.angle of fitted position (CCW/x) [deg]
#ERRAMODEL_WORLD World RMS error of fitted position along major axis [deg]
#ERRBMODEL_WORLD World RMS error of fitted position along minor axis [deg]
#ERRTHETAMODEL_WORLD Error ellipse pos.angle of fitted position (CCW/world-x) [deg]
#ERRTHETAMODEL_SKY Native fitted error ellipse pos. angle (east of north) [deg]
#ERRTHETAMODEL_J2000 J2000 fitted error ellipse pos. angle (east of north) [deg]
#ERRTHETAMODEL_B1950 B1950 fitted error ellipse pos. angle (east of north) [deg]
#X2MODEL_IMAGE Variance along x from model-fitting [pixel**2]
#Y2MODEL_IMAGE Variance along y from model-fitting [pixel**2]
#XYMODEL_IMAGE Covariance between x and y from model-fitting [pixel**2]
#ELLIP1MODEL_IMAGE Ellipticity component from model-fitting
#ELLIP2MODEL_IMAGE Ellipticity component from model-fitting
#POLAR1MODEL_IMAGE Ellipticity component (quadratic) from model-fitting
#POLAR2MODEL_IMAGE Ellipticity component (quadratic) from model-fitting
#ELLIP1ERRMODEL_IMAGE Ellipticity component std.error from model-fitting
#ELLIP2ERRMODEL_IMAGE Ellipticity component std.error from model-fitting
#ELLIPCORRMODEL_IMAGE Corr.coeff between ellip.components from model-fitting
#POLAR1ERRMODEL_IMAGE Polarisation component std.error from model-fitting
#POLAR2ERRMODEL_IMAGE Polarisation component std.error from model-fitting
#POLARCORRMODEL_IMAGE Corr.coeff between polar. components from fitting
#X2MODEL_WORLD Variance along X-WORLD (alpha) from model-fitting [deg**2]
#Y2MODEL_WORLD Variance along Y_WORLD (delta) from model-fitting [deg**2]
#XYMODEL_WORLD Covariance between X-WORLD and Y-WORLD from model-fitting [deg**2]
#ELLIP1MODEL_WORLD Ellipticity component from model-fitting
#ELLIP2MODEL_WORLD Ellipticity component from model-fitting
#POLAR1MODEL_WORLD Polarisation component from model-fitting
#POLAR2MODEL_WORLD Polarisation component from model-fitting
#ELLIP1ERRMODEL_WORLD Ellipticity component std.error from model-fitting
#ELLIP2ERRMODEL_WORLD Ellipticity component std.error from model-fitting
#ELLIPCORRMODEL_WORLD Corr.coeff between ellip.components from model-fitting
#POLAR1ERRMODEL_WORLD Polarisation component std.error from model-fitting
#POLAR2ERRMODEL_WORLD Polarisation component std.error from model-fitting
#POLARCORRMODEL_WORLD Corr.coeff between polar. components from fitting
#CXXMODEL_IMAGE Cxx ellipse parameter from model-fitting [pixel**(-2)]
#CYYMODEL_IMAGE Cyy ellipse parameter from model-fittinh [pixel**(-2)]
#CXYMODEL_IMAGE Cxy ellipse parameter from model-fitting [pixel**(-2)]
#CXXMODEL_WORLD Cxx ellipse parameter (WORLD) from model-fitting [deg**(-2)]
#CYYMODEL_WORLD Cyy ellipse parameter (WORLD) from model-fitting [deg**(-2)]
#CXYMODEL_WORLD Cxy ellipse parameter (WORLD) from model-fitting [deg**(-2)]
#AMODEL_IMAGE Model RMS along major axis [pixel]
#BMODEL_IMAGE Model RMS along minor axis [pixel]
#THETAMODEL_IMAGE Model position angle (CCW/x) [deg]
#AMODEL_WORLD Model RMS along major axis (WORLD units) [deg]
#BMODEL_WORLD Model RMS along minor axis (WORLD units) [deg]
#THETAMODEL_WORLD Model position angle (CCW/WORLD-x) [deg]
#THETAMODEL_SKY Model position angle (east of north) (native) [deg]
#THETAMODEL_J2000 Model position angle (east of north) (J2000) [deg]
#THETAMODEL_B1950 Model position angle (east of north) (B1950) [deg]
#SPREAD_MODEL Spread parameter from model-fitting
#SPREADERR_MODEL Spread parameter error from model-fitting
#FLUX_BACKOFFSET Background offset from fitting [count]
#FLUXERR_BACKOFFSET RMS error on fitted background offset [count]
#FLUX_POINTSOURCE Point source flux from fitting [count]
#FLUXERR_POINTSOURCE RMS error on fitted point source total flux [count]
#MAG_POINTSOURCE Point source total magnitude from fitting [mag]
#MAGERR_POINTSOURCE RMS error on fitted point source total magnitude [mag]
#FLUX_SPHEROID Spheroid total flux from fitting [count]
#FLUXERR_SPHEROID RMS error on fitted spheroid total flux [count]
#MAG_SPHEROID Spheroid total magnitude from fitting [mag]
#MAGERR_SPHEROID RMS error on fitted spheroid total magnitude [mag]
#FLUX_MAX_SPHEROID Peak spheroid flux above background [count]
#FLUX_EFF_SPHEROID Effective spheroid flux above background [count]
#FLUX_MEAN_SPHEROID Mean effective spheroid flux above background [count]
#MU_MAX_SPHEROID Peak spheroid surface brightness above background [mag * arcsec**(-2)]
#MU_EFF_SPHEROID Effective spheroid surface brightness above background [mag * arcsec**(-2)]
#MU_MEAN_SPHEROID Mean effective spheroid surface brightness above backgrou [mag * arcsec**(-2)]
#SPHEROID_REFF_IMAGE Spheroid effective radius from fitting [pixel]
#SPHEROID_REFFERR_IMAGE RMS error on fitted spheroid effective radius [pixel]
#SPHEROID_REFF_WORLD Spheroid effective radius from fitting [deg]
#SPHEROID_REFFERR_WORLD RMS error on fitted spheroid effective radius [deg]
#SPHEROID_ASPECT_IMAGE Spheroid aspect ratio from fitting
#SPHEROID_ASPECTERR_IMAGE RMS error on fitted spheroid aspect ratio
#SPHEROID_ASPECT_WORLD Spheroid aspect ratio from fitting
#SPHEROID_ASPECTERR_WORLD RMS error on fitted spheroid aspect ratio
#SPHEROID_THETA_IMAGE Spheroid position angle (CCW/x) from fitting [deg]
#SPHEROID_THETAERR_IMAGE RMS error on spheroid position angle [deg]
#SPHEROID_THETA_WORLD Spheroid position angle (CCW/world-x) [deg]
#SPHEROID_THETAERR_WORLD RMS error on spheroid position angle [deg]
#SPHEROID_THETA_SKY Spheroid position angle (east of north, native) [deg]
#SPHEROID_THETA_J2000 Spheroid position angle (east of north, J2000) [deg]
#SPHEROID_THETA_B1950 Spheroid position angle (east of north, B1950) [deg]
#SPHEROID_SERSICN Spheroid Sersic index from fitting
#SPHEROID_SERSICNERR RMS error on fitted spheroid Sersic index
#FLUX_DISK Disk total flux from fitting [count]
#FLUXERR_DISK RMS error on fitted disk total flux [count]
#MAG_DISK Disk total magnitude from fitting [mag]
#MAGERR_DISK RMS error on fitted disk total magnitude [mag]
#FLUX_MAX_DISK Peak disk flux above background [count]
#FLUX_EFF_DISK Effective disk flux above background [count]
#FLUX_MEAN_DISK Mean effective disk flux above background [count]
#MU_MAX_DISK Peak disk surface brightness above background [mag * arcsec**(-2)]
#MU_EFF_DISK Effective disk surface brightness above background [mag * arcsec**(-2)]
#MU_MEAN_DISK Mean effective disk surface brightness above background [mag * arcsec**(-2)]
#DISK_SCALE_IMAGE Disk scalelength from fitting [pixel]
#DISK_SCALEERR_IMAGE RMS error on fitted disk scalelength [pixel]
#DISK_SCALE_WORLD Disk scalelength from fitting (world coords) [deg]
#DISK_SCALEERR_WORLD RMS error on fitted disk scalelength (world coords) [deg]
#DISK_ASPECT_IMAGE Disk aspect ratio from fitting
#DISK_ASPECTERR_IMAGE RMS error on fitted disk aspect ratio
#DISK_ASPECT_WORLD Disk aspect ratio from fitting
#DISK_ASPECTERR_WORLD RMS error on disk aspect ratio
#DISK_INCLINATION Disk inclination from fitting [deg]
#DISK_INCLINATIONERR RMS error on disk inclination from fitting [deg]
#DISK_THETA_IMAGE Disk position angle (CCW/x) from fitting [deg]
#DISK_THETAERR_IMAGE RMS error on fitted disk position angle [deg]
#DISK_THETA_WORLD Disk position angle (CCW/world-x) [deg]
#DISK_THETAERR_WORLD RMS error on disk position angle [deg]
#DISK_THETA_SKY Disk position angle (east of north, native) [deg]
#DISK_THETA_J2000 Disk position angle (east of north, J2000) [deg]
#DISK_THETA_B1950 Disk position angle (east of north, B1950) [deg]
- Output parameters#
\(\textbf{Source catalog}\)
\(\textbf{FITS check images}\)
\(\textbf{CLASS\_STAR:}\) can be used to separate point sources and extended sources
0. Importing Necessary Packages#
# Printing the versions of packages
from importlib_metadata import version
for pkg in ['numpy', 'matplotlib', 'astropy', 'pandas']:
print(pkg+": ver "+version(pkg))
numpy: ver 1.26.4
matplotlib: ver 3.8.0
astropy: ver 5.3.4
pandas: ver 2.2.1
%config InlineBackend.figure_format = 'retina'
# importing necessary modules
import numpy as np
import glob, os
from matplotlib import pyplot as plt
from astropy.io import fits
from astropy.visualization import ZScaleInterval
import pandas as pd
command = 'sex' # use 'sextractor' or 'source-extractor', depending on your installation.
1. Writing Input Files#
1) Image list#
dir_img = "Images/"
band = ["F606W", "F814W"]
imglist = sorted(glob.glob(dir_img+"*.fits"))
imglist
['Images/M0717_F606W.fits', 'Images/M0717_F814W.fits']
hdu_606 = fits.open(imglist[0])
hdu_814 = fits.open(imglist[1])
interval = ZScaleInterval()
vmin_606, vmax_606 = interval.get_limits(hdu_606[0].data)
vmin_814, vmax_814 = interval.get_limits(hdu_814[0].data)
fig, axes = plt.subplots(1,2, figsize=(10, 4))
axes[0].imshow(hdu_606[0].data, vmin=vmin_606, vmax=vmax_606)
axes[0].set_title('M0717 [F606W]')
axes[1].imshow(hdu_814[0].data, vmin=vmin_814, vmax=vmax_814)
axes[1].set_title('M0717 [F814W]')
plt.show()
2) Configuration file#
config_name = "config.txt"
os.system(command+" -dd > "+config_name)
0
3) Output parameter file#
param_name = "output.param"
f = open(param_name, "w")
f.write("X_IMAGE\n") # Object position along x [pixel]
f.write("Y_IMAGE\n") # Object position along y [pixel]
f.write("NUMBER\n") # Object number
f.write("MAG_AUTO\n") # Kron-like elliptical aperture magnitude [mag]
f.write("MAGERR_AUTO\n") # RMS error for MAG_AUTO [mag]
f.write("KRON_RADIUS\n") # Kron apertures in units of A or B
f.write("BACKGROUND\n") # Background at centroid position
f.write("ALPHA_J2000\n") # Right ascension of object center (J2000)
f.write("DELTA_J2000\n") # Declination of object center (J2000)
f.write("A_IMAGE\n") # Along major axis
f.write("B_IMAGE\n") # Along minor axis
f.write("THETA_IMAGE\n") # Position angle
f.write("MU_MAX\n") # Peak surface brightness above background
f.write("FLAGS\n") # Extraction flags
f.write("FWHM_IMAGE\n") # FWHM assuming a gaussian core
f.write("FLUX_RADIUS\n") # Half-light radii
f.write("CLASS_STAR\n") # Star/Galaxy classifier output
f.close()
4) Determining input parameters#
h606 = fits.getheader(imglist[0])
h814 = fits.getheader(imglist[1])
# band = ["F606W", "F814W"]
cat_name = ["606.cat", "814.cat"]
detect_minarea = 5 # DETECT_MINAREA = 5 (default)
detect_thresh = 1.5 # DETECT_THRESH = 1.5 (default)
saturated = 25.0 # SATUR_LEVEL = 100.0 (depending on the image!)
mag0 = [-2.5*np.log10(h606['PHOTFLAM'])-5.0*np.log10(h606['PHOTPLAM'])-2.408,
-2.5*np.log10(h814['PHOTFLAM'])-5.0*np.log10(h814['PHOTPLAM'])-2.408]
egain = [h606['CCDGAIN']*h606['EXPTIME'], h814['CCDGAIN']*h814['EXPTIME']]
# GAIN (effective gain) = gain*exptime (for c/s image) --> this parameter only affects the magnitude error value!
pixel_scale = 0.03 # arcsec/pixel
fwhm = [0.09, 0.09] # For HST images, seeing FWHMs are typically 3 pixels (~ 0.09 arcsec).
# However, you can directly measure the FWHM value in your image using imexamine or etc.,
# because the FWHM value can also vary with image quality.
back_size = 32 # BACK_SIZE = 64 (default) --> 32 (revised)
# Smaller BACK_SIZE --> Can subtract more local background --> Can detect more sources
checkimg = ["606_aper.fits", "814_aper.fits"] # CHECKIMAGE_NAME (apertures)
refimg = imglist[1]
For magnitude zeropoints of the HST images, you can refer to the below web page.
ACS zeropoint - Photometric Keywords in SCI Extensions of ACS Images (AB magnitude zeropoint)
PHOTFLAM or PHOTPLAM are written in the image header.
5) Shell script for SExtractor photometry#
- Importance of Dual-mode photometry#
Number of detected sources are different between the two filters.
Shape and size of aperture is different for identical sources in different filter images (if MAG_AUTO is used).
To compute colors, it is important to run SExtractor in \(\color{blue}{\rm dual\:mode}\).
- Running SExtractor in Dual mode#
running command: sex [detection image], [photometry image] -c [configuration file]
Detection image: reference image with all the detected sources (image with longer exposure time and better quality)
Photometry image: image to perform photometry on
Filter with longest exposure time for project = F814W = detection image
Or you can create a new detection image with F606W+F814W
running command Ex)
sextractor [F814W image] -c [F814W configuration file]
sextractor [F606W image] -c [F606W configuration file] \(\color{blue}{\rm \#\:single\:mode}\)
sextractor [F814W image],[F606W image] -c [F606W configuration file] \(\color{blue}{\rm \#\:dual\:mode}\)
scr_name = "sephot.sh"
f = open(scr_name, "w")
for i in np.arange(len(band)):
# Reference image
if (imglist[i] == refimg):
txt = command+" "+imglist[i]+" -c config.txt -CATALOG_NAME "+cat_name[i]+" -PARAMETERS_NAME output.param "
# Non-reference image
else:
txt = command+" "+refimg+","+imglist[i]+" -c config.txt -CATALOG_NAME "+cat_name[i]+" -PARAMETERS_NAME output.param "
txt += f"-DETECT_MINAREA {detect_minarea:d} -DETECT_THRESH {detect_thresh:.1f} "
txt += f"-FILTER_NAME {SEXDIR}default.conv -SATUR_LEVEL {saturated:.1f} "
txt += f"-MAG_ZEROPOINT {mag0[i]:.4f} -GAIN {egain[i]:.2f} -PIXEL_SCALE {pixel_scale:.2f} "
txt += f"-SEEING_FWHM {fwhm[i]:.2f} -STARNNW_NAME {SEXDIR}default.nnw -BACK_SIZE {back_size:d} "
txt += "-CHECKIMAGE_TYPE APERTURES -CHECKIMAGE_NAME "+checkimg[i]
txt += "\n"
f.write(txt)
f.close()
2. Running SExtractor#
os.system("sh sephot.sh")
Show code cell output
>
----- SExtractor 2.28.0 started on 2024-04-24 at 11:19:58 with 1 thread
> Setting catalog parameters
> Reading detection filter
> Initializing Neural Network
> Reading Neural Network Weights
> Initializing check-image(s)
> Initializing catalog
> Looking for M0717_F814W.fits
----- Detecting from: M0717_F814W.fits
"Unnamed" / no ext. header / 5961x4381 / 32 bits (floats)
> Looking for M0717_F606W.fits
----- Measuring from: M0717_F606W.fits
"Unnamed" / no ext. header / 5961x4381 / 32 bits (floats)
Measurement image:> Setting up background maps
> Setting up background map at line: 32
> Setting up background map at line: 64
> Setting up background map at line: 96
> Setting up background map at line: 128
> Setting up background map at line: 160
> Setting up background map at line: 192
> Setting up background map at line: 224
> Setting up background map at line: 256
> Setting up background map at line: 288
> Setting up background map at line: 320
> Setting up background map at line: 352
> Setting up background map at line: 384
> Setting up background map at line: 416
> Setting up background map at line: 448
> Setting up background map at line: 480
> Setting up background map at line: 512
> Setting up background map at line: 544
> Setting up background map at line: 576
> Setting up background map at line: 608
> Setting up background map at line: 640
> Setting up background map at line: 672
> Setting up background map at line: 704
> Setting up background map at line: 736
> Setting up background map at line: 768
> Setting up background map at line: 800
> Setting up background map at line: 832
> Setting up background map at line: 864
> Setting up background map at line: 896
> Setting up background map at line: 928
> Setting up background map at line: 960
> Setting up background map at line: 992
> Setting up background map at line: 1024
> Setting up background map at line: 1056
> Setting up background map at line: 1088
> Setting up background map at line: 1120
> Setting up background map at line: 1152
> Setting up background map at line: 1184
> Setting up background map at line: 1216
> Setting up background map at line: 1248
> Setting up background map at line: 1280
> Setting up background map at line: 1312
> Setting up background map at line: 1344
> Setting up background map at line: 1376
> Setting up background map at line: 1408
> Setting up background map at line: 1440
> Setting up background map at line: 1472
> Setting up background map at line: 1504
> Setting up background map at line: 1536
> Setting up background map at line: 1568
> Setting up background map at line: 1600
> Setting up background map at line: 1632
> Setting up background map at line: 1664
> Setting up background map at line: 1696
> Setting up background map at line: 1728
> Setting up background map at line: 1760
> Setting up background map at line: 1792
> Setting up background map at line: 1824
> Setting up background map at line: 1856
> Setting up background map at line: 1888
> Setting up background map at line: 1920
> Setting up background map at line: 1952
> Setting up background map at line: 1984
> Setting up background map at line: 2016
> Setting up background map at line: 2048
> Setting up background map at line: 2080
> Setting up background map at line: 2112
> Setting up background map at line: 2144
> Setting up background map at line: 2176
> Setting up background map at line: 2208
> Setting up background map at line: 2240
> Setting up background map at line: 2272
> Setting up background map at line: 2304
> Setting up background map at line: 2336
> Setting up background map at line: 2368
> Setting up background map at line: 2400
> Setting up background map at line: 2432
> Setting up background map at line: 2464
> Setting up background map at line: 2496
> Setting up background map at line: 2528
> Setting up background map at line: 2560
> Setting up background map at line: 2592
> Setting up background map at line: 2624
> Setting up background map at line: 2656
> Setting up background map at line: 2688
> Setting up background map at line: 2720
> Setting up background map at line: 2752
> Setting up background map at line: 2784
> Setting up background map at line: 2816
> Setting up background map at line: 2848
> Setting up background map at line: 2880
> Setting up background map at line: 2912
> Setting up background map at line: 2944
> Setting up background map at line: 2976
> Setting up background map at line: 3008
> Setting up background map at line: 3040
> Setting up background map at line: 3072
> Setting up background map at line: 3104
> Setting up background map at line: 3136
> Setting up background map at line: 3168
> Setting up background map at line: 3200
> Setting up background map at line: 3232
> Setting up background map at line: 3264
> Setting up background map at line: 3296
> Setting up background map at line: 3328
> Setting up background map at line: 3360
> Setting up background map at line: 3392
> Setting up background map at line: 3424
> Setting up background map at line: 3456
> Setting up background map at line: 3488
> Setting up background map at line: 3520
> Setting up background map at line: 3552
> Setting up background map at line: 3584
> Setting up background map at line: 3616
> Setting up background map at line: 3648
> Setting up background map at line: 3680
> Setting up background map at line: 3712
> Setting up background map at line: 3744
> Setting up background map at line: 3776
> Setting up background map at line: 3808
> Setting up background map at line: 3840
> Setting up background map at line: 3872
> Setting up background map at line: 3904
> Setting up background map at line: 3936
> Setting up background map at line: 3968
> Setting up background map at line: 4000
> Setting up background map at line: 4032
> Setting up background map at line: 4064
> Setting up background map at line: 4096
> Setting up background map at line: 4128
> Setting up background map at line: 4160
> Setting up background map at line: 4192
> Setting up background map at line: 4224
> Setting up background map at line: 4256
> Setting up background map at line: 4288
> Setting up background map at line: 4320
> Setting up background map at line: 4352
> Filtering background map(s)
> Computing background d-map
> Computing background-noise d-map
(M) Background: 0.000301342 RMS: 0.001017 / Threshold: 0.0015255
Detection image: > Setting up background maps
> Setting up background map at line: 32
> Setting up background map at line: 64
> Setting up background map at line: 96
> Setting up background map at line: 128
> Setting up background map at line: 160
> Setting up background map at line: 192
> Setting up background map at line: 224
> Setting up background map at line: 256
> Setting up background map at line: 288
> Setting up background map at line: 320
> Setting up background map at line: 352
> Setting up background map at line: 384
> Setting up background map at line: 416
> Setting up background map at line: 448
> Setting up background map at line: 480
> Setting up background map at line: 512
> Setting up background map at line: 544
> Setting up background map at line: 576
> Setting up background map at line: 608
> Setting up background map at line: 640
> Setting up background map at line: 672
> Setting up background map at line: 704
> Setting up background map at line: 736
> Setting up background map at line: 768
> Setting up background map at line: 800
> Setting up background map at line: 832
> Setting up background map at line: 864
> Setting up background map at line: 896
> Setting up background map at line: 928
> Setting up background map at line: 960
> Setting up background map at line: 992
> Setting up background map at line: 1024
> Setting up background map at line: 1056
> Setting up background map at line: 1088
> Setting up background map at line: 1120
> Setting up background map at line: 1152
> Setting up background map at line: 1184
> Setting up background map at line: 1216
> Setting up background map at line: 1248
> Setting up background map at line: 1280
> Setting up background map at line: 1312
> Setting up background map at line: 1344
> Setting up background map at line: 1376
> Setting up background map at line: 1408
> Setting up background map at line: 1440
> Setting up background map at line: 1472
> Setting up background map at line: 1504
> Setting up background map at line: 1536
> Setting up background map at line: 1568
> Setting up background map at line: 1600
> Setting up background map at line: 1632
> Setting up background map at line: 1664
> Setting up background map at line: 1696
> Setting up background map at line: 1728
> Setting up background map at line: 1760
> Setting up background map at line: 1792
> Setting up background map at line: 1824
> Setting up background map at line: 1856
> Setting up background map at line: 1888
> Setting up background map at line: 1920
> Setting up background map at line: 1952
> Setting up background map at line: 1984
> Setting up background map at line: 2016
> Setting up background map at line: 2048
> Setting up background map at line: 2080
> Setting up background map at line: 2112
> Setting up background map at line: 2144
> Setting up background map at line: 2176
> Setting up background map at line: 2208
> Setting up background map at line: 2240
> Setting up background map at line: 2272
> Setting up background map at line: 2304
> Setting up background map at line: 2336
> Setting up background map at line: 2368
> Setting up background map at line: 2400
> Setting up background map at line: 2432
> Setting up background map at line: 2464
> Setting up background map at line: 2496
> Setting up background map at line: 2528
> Setting up background map at line: 2560
> Setting up background map at line: 2592
> Setting up background map at line: 2624
> Setting up background map at line: 2656
> Setting up background map at line: 2688
> Setting up background map at line: 2720
> Setting up background map at line: 2752
> Setting up background map at line: 2784
> Setting up background map at line: 2816
> Setting up background map at line: 2848
> Setting up background map at line: 2880
> Setting up background map at line: 2912
> Setting up background map at line: 2944
> Setting up background map at line: 2976
> Setting up background map at line: 3008
> Setting up background map at line: 3040
> Setting up background map at line: 3072
> Setting up background map at line: 3104
> Setting up background map at line: 3136
> Setting up background map at line: 3168
> Setting up background map at line: 3200
> Setting up background map at line: 3232
> Setting up background map at line: 3264
> Setting up background map at line: 3296
> Setting up background map at line: 3328
> Setting up background map at line: 3360
> Setting up background map at line: 3392
> Setting up background map at line: 3424
> Setting up background map at line: 3456
> Setting up background map at line: 3488
> Setting up background map at line: 3520
> Setting up background map at line: 3552
> Setting up background map at line: 3584
> Setting up background map at line: 3616
> Setting up background map at line: 3648
> Setting up background map at line: 3680
> Setting up background map at line: 3712
> Setting up background map at line: 3744
> Setting up background map at line: 3776
> Setting up background map at line: 3808
> Setting up background map at line: 3840
> Setting up background map at line: 3872
> Setting up background map at line: 3904
> Setting up background map at line: 3936
> Setting up background map at line: 3968
> Setting up background map at line: 4000
> Setting up background map at line: 4032
> Setting up background map at line: 4064
> Setting up background map at line: 4096
> Setting up background map at line: 4128
> Setting up background map at line: 4160
> Setting up background map at line: 4192
> Setting up background map at line: 4224
> Setting up background map at line: 4256
> Setting up background map at line: 4288
> Setting up background map at line: 4320
> Setting up background map at line: 4352
> Filtering background map(s)
> Computing background d-map
> Computing background-noise d-map
(D) Background: 0.000520703 RMS: 0.000520161 / Threshold: 0.000780242
> Scanning image
> Line: 25 Objects: 61 detected / 0 sextracted
> Line: 50 Objects: 151 detected / 0 sextracted
> Line: 75 Objects: 228 detected / 0 sextracted
> Line: 100 Objects: 277 detected / 0 sextracted
> Line: 125 Objects: 365 detected / 0 sextracted
> Line: 150 Objects: 439 detected / 0 sextracted
> Line: 175 Objects: 507 detected / 0 sextracted
> Line: 200 Objects: 592 detected / 0 sextracted
> Line: 225 Objects: 674 detected / 0 sextracted
> Line: 250 Objects: 761 detected / 0 sextracted
> Line: 275 Objects: 844 detected / 0 sextracted
> Line: 300 Objects: 912 detected / 0 sextracted
> Line: 325 Objects: 967 detected / 0 sextracted
> Line: 350 Objects: 1053 detected / 0 sextracted
> Line: 375 Objects: 1127 detected / 0 sextracted
> Line: 400 Objects: 1206 detected / 0 sextracted
> Line: 425 Objects: 1296 detected / 0 sextracted
> Line: 450 Objects: 1377 detected / 0 sextracted
> Line: 475 Objects: 1451 detected / 0 sextracted
> Line: 500 Objects: 1539 detected / 0 sextracted
> Line: 525 Objects: 1611 detected / 0 sextracted
> Line: 550 Objects: 1681 detected / 0 sextracted
> Line: 575 Objects: 1776 detected / 0 sextracted
> Line: 600 Objects: 1851 detected / 0 sextracted
> Line: 625 Objects: 1933 detected / 0 sextracted
> Line: 650 Objects: 2029 detected / 0 sextracted
> Line: 675 Objects: 2146 detected / 0 sextracted
> Line: 700 Objects: 2236 detected / 0 sextracted
> Line: 725 Objects: 2331 detected / 0 sextracted
> Line: 750 Objects: 2394 detected / 0 sextracted
> Line: 775 Objects: 2464 detected / 0 sextracted
> Line: 800 Objects: 2544 detected / 0 sextracted
> Line: 825 Objects: 2628 detected / 0 sextracted
> Line: 850 Objects: 2710 detected / 0 sextracted
> Line: 875 Objects: 2781 detected / 0 sextracted
> Line: 900 Objects: 2863 detected / 0 sextracted
> Line: 925 Objects: 2938 detected / 0 sextracted
> Line: 950 Objects: 3039 detected / 0 sextracted
> Line: 975 Objects: 3115 detected / 0 sextracted
> Line: 1000 Objects: 3194 detected / 0 sextracted
> Line: 1022 Objects: 3244 detected / 0 sextracted
> Line: 1025 Objects: 3253 detected / 94 sextracted
> Line: 1050 Objects: 3314 detected / 144 sextracted
> Line: 1075 Objects: 3396 detected / 180 sextracted
> Line: 1100 Objects: 3484 detected / 215 sextracted
> Line: 1125 Objects: 3584 detected / 269 sextracted
> Line: 1150 Objects: 3664 detected / 316 sextracted
> Line: 1175 Objects: 3750 detected / 339 sextracted
> Line: 1200 Objects: 3839 detected / 383 sextracted
> Line: 1211 Objects: 3884 detected / 400 sextracted
> Line: 1225 Objects: 3950 detected / 433 sextracted
> Line: 1250 Objects: 4052 detected / 477 sextracted
> Line: 1275 Objects: 4177 detected / 514 sextracted
> Line: 1300 Objects: 4282 detected / 545 sextracted
> Line: 1325 Objects: 4361 detected / 580 sextracted
> Line: 1350 Objects: 4471 detected / 620 sextracted
> Line: 1375 Objects: 4570 detected / 661 sextracted
> Line: 1400 Objects: 4638 detected / 706 sextracted
> Line: 1425 Objects: 4741 detected / 753 sextracted
> Line: 1450 Objects: 4835 detected / 793 sextracted
> Line: 1455 Objects: 4851 detected / 800 sextracted
> Line: 1475 Objects: 4933 detected / 831 sextracted
> Line: 1500 Objects: 5025 detected / 873 sextracted
> Line: 1525 Objects: 5102 detected / 908 sextracted
> Line: 1550 Objects: 5205 detected / 948 sextracted
> Line: 1575 Objects: 5301 detected / 997 sextracted
> Line: 1600 Objects: 5397 detected / 1034 sextracted
> Line: 1625 Objects: 5528 detected / 1087 sextracted
> Line: 1650 Objects: 5630 detected / 1130 sextracted
> Line: 1675 Objects: 5715 detected / 1174 sextracted
> Line: 1689 Objects: 5742 detected / 1200 sextracted
> Line: 1700 Objects: 5782 detected / 1216 sextracted
> Line: 1725 Objects: 5855 detected / 1261 sextracted
> Line: 1750 Objects: 5936 detected / 1299 sextracted
> Line: 1775 Objects: 5999 detected / 1340 sextracted
> Line: 1800 Objects: 6095 detected / 1373 sextracted
> Line: 1825 Objects: 6181 detected / 1405 sextracted
> Line: 1850 Objects: 6305 detected / 1443 sextracted
> Line: 1875 Objects: 6397 detected / 1478 sextracted
> Line: 1900 Objects: 6485 detected / 1521 sextracted
> Line: 1925 Objects: 6591 detected / 1562 sextracted
> Line: 1947 Objects: 6666 detected / 1600 sextracted
> Line: 1950 Objects: 6675 detected / 1604 sextracted
> Line: 1975 Objects: 6773 detected / 1645 sextracted
> Line: 2000 Objects: 6850 detected / 1674 sextracted
> Line: 2025 Objects: 6947 detected / 1712 sextracted
> Line: 2050 Objects: 7035 detected / 1746 sextracted
> Line: 2075 Objects: 7126 detected / 1792 sextracted
> Line: 2100 Objects: 7200 detected / 1835 sextracted
> Line: 2125 Objects: 7284 detected / 1879 sextracted
> Line: 2150 Objects: 7404 detected / 1919 sextracted
> Line: 2175 Objects: 7486 detected / 1966 sextracted
> Line: 2191 Objects: 7547 detected / 2000 sextracted
> Line: 2200 Objects: 7577 detected / 2015 sextracted
> Line: 2225 Objects: 7693 detected / 2064 sextracted
> Line: 2250 Objects: 7780 detected / 2118 sextracted
> Line: 2275 Objects: 7852 detected / 2166 sextracted
> Line: 2300 Objects: 7917 detected / 2216 sextracted
> Line: 2325 Objects: 7986 detected / 2260 sextracted
> Line: 2350 Objects: 8055 detected / 2316 sextracted
> Line: 2375 Objects: 8137 detected / 2369 sextracted
> Line: 2398 Objects: 8188 detected / 2400 sextracted
> Line: 2400 Objects: 8196 detected / 2404 sextracted
> Line: 2425 Objects: 8267 detected / 2457 sextracted
> Line: 2450 Objects: 8349 detected / 2500 sextracted
> Line: 2475 Objects: 8437 detected / 2551 sextracted
> Line: 2500 Objects: 8516 detected / 2598 sextracted
> Line: 2525 Objects: 8594 detected / 2637 sextracted
> Line: 2550 Objects: 8680 detected / 2683 sextracted
> Line: 2575 Objects: 8761 detected / 2744 sextracted
> Line: 2600 Objects: 8849 detected / 2794 sextracted
> Line: 2605 Objects: 8870 detected / 2800 sextracted
> Line: 2625 Objects: 8951 detected / 2849 sextracted
> Line: 2650 Objects: 9003 detected / 2898 sextracted
> Line: 2675 Objects: 9070 detected / 2941 sextracted
> Line: 2700 Objects: 9145 detected / 2995 sextracted
> Line: 2725 Objects: 9231 detected / 3039 sextracted
> Line: 2750 Objects: 9337 detected / 3085 sextracted
> Line: 2775 Objects: 9430 detected / 3130 sextracted
> Line: 2800 Objects: 9524 detected / 3177 sextracted
> Line: 2812 Objects: 9572 detected / 3200 sextracted
> Line: 2825 Objects: 9631 detected / 3224 sextracted
> Line: 2850 Objects: 9728 detected / 3269 sextracted
> Line: 2875 Objects: 9816 detected / 3324 sextracted
> Line: 2900 Objects: 9887 detected / 3368 sextracted
> Line: 2925 Objects: 9983 detected / 3422 sextracted
> Line: 2950 Objects: 10072 detected / 3476 sextracted
> Line: 2975 Objects: 10150 detected / 3521 sextracted
> Line: 3000 Objects: 10240 detected / 3568 sextracted
> Line: 3025 Objects: 10318 detected / 3596 sextracted
> Line: 3028 Objects: 10330 detected / 3600 sextracted
> Line: 3050 Objects: 10405 detected / 3630 sextracted
> Line: 3075 Objects: 10523 detected / 3667 sextracted
> Line: 3100 Objects: 10610 detected / 3697 sextracted
> Line: 3125 Objects: 10687 detected / 3742 sextracted
> Line: 3150 Objects: 10803 detected / 3782 sextracted
> Line: 3175 Objects: 10909 detected / 3831 sextracted
> Line: 3200 Objects: 11015 detected / 3864 sextracted
> Line: 3225 Objects: 11133 detected / 3902 sextracted
> Line: 3250 Objects: 11251 detected / 3946 sextracted
> Line: 3275 Objects: 11342 detected / 3980 sextracted
> Line: 3284 Objects: 11370 detected / 4000 sextracted
> Line: 3300 Objects: 11411 detected / 4030 sextracted
> Line: 3325 Objects: 11505 detected / 4068 sextracted
> Line: 3350 Objects: 11584 detected / 4114 sextracted
> Line: 3375 Objects: 11666 detected / 4151 sextracted
> Line: 3400 Objects: 11757 detected / 4194 sextracted
> Line: 3425 Objects: 11851 detected / 4233 sextracted
> Line: 3450 Objects: 11962 detected / 4282 sextracted
> Line: 3475 Objects: 12035 detected / 4325 sextracted
> Line: 3500 Objects: 12095 detected / 4373 sextracted
> Line: 3521 Objects: 12152 detected / 4400 sextracted
> Line: 3525 Objects: 12168 detected / 4413 sextracted
> Line: 3550 Objects: 12251 detected / 4457 sextracted
> Line: 3575 Objects: 12326 detected / 4498 sextracted
> Line: 3600 Objects: 12402 detected / 4544 sextracted
> Line: 3625 Objects: 12483 detected / 4584 sextracted
> Line: 3650 Objects: 12561 detected / 4614 sextracted
> Line: 3675 Objects: 12652 detected / 4651 sextracted
> Line: 3700 Objects: 12729 detected / 4687 sextracted
> Line: 3725 Objects: 12820 detected / 4726 sextracted
> Line: 3750 Objects: 12895 detected / 4761 sextracted
> Line: 3775 Objects: 12982 detected / 4790 sextracted
> Line: 3786 Objects: 13011 detected / 4800 sextracted
> Line: 3800 Objects: 13053 detected / 4816 sextracted
> Line: 3825 Objects: 13159 detected / 4847 sextracted
> Line: 3850 Objects: 13259 detected / 4883 sextracted
> Line: 3875 Objects: 13344 detected / 4928 sextracted
> Line: 3900 Objects: 13416 detected / 4960 sextracted
> Line: 3925 Objects: 13502 detected / 4995 sextracted
> Line: 3950 Objects: 13565 detected / 5028 sextracted
> Line: 3975 Objects: 13653 detected / 5050 sextracted
> Line: 4000 Objects: 13742 detected / 5090 sextracted
> Line: 4025 Objects: 13819 detected / 5120 sextracted
> Line: 4050 Objects: 13893 detected / 5165 sextracted
> Line: 4071 Objects: 13975 detected / 5200 sextracted
> Line: 4075 Objects: 13985 detected / 5206 sextracted
> Line: 4100 Objects: 14047 detected / 5242 sextracted
> Line: 4125 Objects: 14115 detected / 5279 sextracted
> Line: 4150 Objects: 14181 detected / 5314 sextracted
> Line: 4175 Objects: 14258 detected / 5346 sextracted
> Line: 4200 Objects: 14329 detected / 5383 sextracted
> Line: 4225 Objects: 14391 detected / 5437 sextracted
> Line: 4250 Objects: 14473 detected / 5480 sextracted
> Line: 4275 Objects: 14525 detected / 5508 sextracted
> Line: 4300 Objects: 14599 detected / 5538 sextracted
> Line: 4325 Objects: 14668 detected / 5577 sextracted
> Line: 4342 Objects: 14720 detected / 5600 sextracted
> Line: 4350 Objects: 14735 detected / 5615 sextracted
> Line: 4375 Objects: 14804 detected / 5662 sextracted
> Line: 4381 Objects: 14858 detected / 6000 sextracted
> Line: 4381 Objects: 14858 detected / 6400 sextracted
> Line: 4381 Objects: 14858 detected / 6800 sextracted
> Line: 4381 Objects: 14858 detected / 7200 sextracted
Objects: detected 14858 / sextracted 7243
> Closing files
>
> All done (in 4.1 s: 1068.0 lines/s , 1765.8 detections/s)
>
----- SExtractor 2.28.0 started on 2024-04-24 at 11:20:02 with 1 thread
> Setting catalog parameters
> Reading detection filter
> Initializing Neural Network
> Reading Neural Network Weights
> Initializing check-image(s)
> Initializing catalog
> Looking for M0717_F814W.fits
----- Measuring from: M0717_F814W.fits
"Unnamed" / no ext. header / 5961x4381 / 32 bits (floats)
Detection+Measurement image: > Setting up background maps
> Setting up background map at line: 32
> Setting up background map at line: 64
> Setting up background map at line: 96
> Setting up background map at line: 128
> Setting up background map at line: 160
> Setting up background map at line: 192
> Setting up background map at line: 224
> Setting up background map at line: 256
> Setting up background map at line: 288
> Setting up background map at line: 320
> Setting up background map at line: 352
> Setting up background map at line: 384
> Setting up background map at line: 416
> Setting up background map at line: 448
> Setting up background map at line: 480
> Setting up background map at line: 512
> Setting up background map at line: 544
> Setting up background map at line: 576
> Setting up background map at line: 608
> Setting up background map at line: 640
> Setting up background map at line: 672
> Setting up background map at line: 704
> Setting up background map at line: 736
> Setting up background map at line: 768
> Setting up background map at line: 800
> Setting up background map at line: 832
> Setting up background map at line: 864
> Setting up background map at line: 896
> Setting up background map at line: 928
> Setting up background map at line: 960
> Setting up background map at line: 992
> Setting up background map at line: 1024
> Setting up background map at line: 1056
> Setting up background map at line: 1088
> Setting up background map at line: 1120
> Setting up background map at line: 1152
> Setting up background map at line: 1184
> Setting up background map at line: 1216
> Setting up background map at line: 1248
> Setting up background map at line: 1280
> Setting up background map at line: 1312
> Setting up background map at line: 1344
> Setting up background map at line: 1376
> Setting up background map at line: 1408
> Setting up background map at line: 1440
> Setting up background map at line: 1472
> Setting up background map at line: 1504
> Setting up background map at line: 1536
> Setting up background map at line: 1568
> Setting up background map at line: 1600
> Setting up background map at line: 1632
> Setting up background map at line: 1664
> Setting up background map at line: 1696
> Setting up background map at line: 1728
> Setting up background map at line: 1760
> Setting up background map at line: 1792
> Setting up background map at line: 1824
> Setting up background map at line: 1856
> Setting up background map at line: 1888
> Setting up background map at line: 1920
> Setting up background map at line: 1952
> Setting up background map at line: 1984
> Setting up background map at line: 2016
> Setting up background map at line: 2048
> Setting up background map at line: 2080
> Setting up background map at line: 2112
> Setting up background map at line: 2144
> Setting up background map at line: 2176
> Setting up background map at line: 2208
> Setting up background map at line: 2240
> Setting up background map at line: 2272
> Setting up background map at line: 2304
> Setting up background map at line: 2336
> Setting up background map at line: 2368
> Setting up background map at line: 2400
> Setting up background map at line: 2432
> Setting up background map at line: 2464
> Setting up background map at line: 2496
> Setting up background map at line: 2528
> Setting up background map at line: 2560
> Setting up background map at line: 2592
> Setting up background map at line: 2624
> Setting up background map at line: 2656
> Setting up background map at line: 2688
> Setting up background map at line: 2720
> Setting up background map at line: 2752
> Setting up background map at line: 2784
> Setting up background map at line: 2816
> Setting up background map at line: 2848
> Setting up background map at line: 2880
> Setting up background map at line: 2912
> Setting up background map at line: 2944
> Setting up background map at line: 2976
> Setting up background map at line: 3008
> Setting up background map at line: 3040
> Setting up background map at line: 3072
> Setting up background map at line: 3104
> Setting up background map at line: 3136
> Setting up background map at line: 3168
> Setting up background map at line: 3200
> Setting up background map at line: 3232
> Setting up background map at line: 3264
> Setting up background map at line: 3296
> Setting up background map at line: 3328
> Setting up background map at line: 3360
> Setting up background map at line: 3392
> Setting up background map at line: 3424
> Setting up background map at line: 3456
> Setting up background map at line: 3488
> Setting up background map at line: 3520
> Setting up background map at line: 3552
> Setting up background map at line: 3584
> Setting up background map at line: 3616
> Setting up background map at line: 3648
> Setting up background map at line: 3680
> Setting up background map at line: 3712
> Setting up background map at line: 3744
> Setting up background map at line: 3776
> Setting up background map at line: 3808
> Setting up background map at line: 3840
> Setting up background map at line: 3872
> Setting up background map at line: 3904
> Setting up background map at line: 3936
> Setting up background map at line: 3968
> Setting up background map at line: 4000
> Setting up background map at line: 4032
> Setting up background map at line: 4064
> Setting up background map at line: 4096
> Setting up background map at line: 4128
> Setting up background map at line: 4160
> Setting up background map at line: 4192
> Setting up background map at line: 4224
> Setting up background map at line: 4256
> Setting up background map at line: 4288
> Setting up background map at line: 4320
> Setting up background map at line: 4352
> Filtering background map(s)
> Computing background d-map
> Computing background-noise d-map
(M+D) Background: 0.000520703 RMS: 0.000520161 / Threshold: 0.000780242
> Scanning image
> Line: 25 Objects: 61 detected / 0 sextracted
> Line: 50 Objects: 151 detected / 0 sextracted
> Line: 75 Objects: 228 detected / 0 sextracted
> Line: 100 Objects: 277 detected / 0 sextracted
> Line: 125 Objects: 365 detected / 0 sextracted
> Line: 150 Objects: 439 detected / 0 sextracted
> Line: 175 Objects: 507 detected / 0 sextracted
> Line: 200 Objects: 592 detected / 0 sextracted
> Line: 225 Objects: 674 detected / 0 sextracted
> Line: 250 Objects: 761 detected / 0 sextracted
> Line: 275 Objects: 844 detected / 0 sextracted
> Line: 300 Objects: 912 detected / 0 sextracted
> Line: 325 Objects: 967 detected / 0 sextracted
> Line: 350 Objects: 1053 detected / 0 sextracted
> Line: 375 Objects: 1127 detected / 0 sextracted
> Line: 400 Objects: 1206 detected / 0 sextracted
> Line: 425 Objects: 1296 detected / 0 sextracted
> Line: 450 Objects: 1377 detected / 0 sextracted
> Line: 475 Objects: 1451 detected / 0 sextracted
> Line: 500 Objects: 1539 detected / 0 sextracted
> Line: 525 Objects: 1611 detected / 0 sextracted
> Line: 550 Objects: 1681 detected / 0 sextracted
> Line: 575 Objects: 1776 detected / 0 sextracted
> Line: 600 Objects: 1851 detected / 0 sextracted
> Line: 625 Objects: 1933 detected / 0 sextracted
> Line: 650 Objects: 2029 detected / 0 sextracted
> Line: 675 Objects: 2146 detected / 0 sextracted
> Line: 700 Objects: 2236 detected / 0 sextracted
> Line: 725 Objects: 2331 detected / 0 sextracted
> Line: 750 Objects: 2394 detected / 0 sextracted
> Line: 775 Objects: 2464 detected / 0 sextracted
> Line: 800 Objects: 2544 detected / 0 sextracted
> Line: 825 Objects: 2628 detected / 0 sextracted
> Line: 850 Objects: 2710 detected / 0 sextracted
> Line: 875 Objects: 2781 detected / 0 sextracted
> Line: 900 Objects: 2863 detected / 0 sextracted
> Line: 925 Objects: 2938 detected / 0 sextracted
> Line: 950 Objects: 3039 detected / 0 sextracted
> Line: 975 Objects: 3115 detected / 0 sextracted
> Line: 1000 Objects: 3194 detected / 0 sextracted
> Line: 1022 Objects: 3244 detected / 0 sextracted
> Line: 1025 Objects: 3253 detected / 94 sextracted
> Line: 1050 Objects: 3314 detected / 144 sextracted
> Line: 1075 Objects: 3396 detected / 180 sextracted
> Line: 1100 Objects: 3484 detected / 215 sextracted
> Line: 1125 Objects: 3584 detected / 269 sextracted
> Line: 1150 Objects: 3664 detected / 316 sextracted
> Line: 1175 Objects: 3750 detected / 339 sextracted
> Line: 1200 Objects: 3839 detected / 383 sextracted
> Line: 1211 Objects: 3884 detected / 400 sextracted
> Line: 1225 Objects: 3950 detected / 433 sextracted
> Line: 1250 Objects: 4052 detected / 477 sextracted
> Line: 1275 Objects: 4177 detected / 514 sextracted
> Line: 1300 Objects: 4282 detected / 545 sextracted
> Line: 1325 Objects: 4361 detected / 580 sextracted
> Line: 1350 Objects: 4471 detected / 620 sextracted
> Line: 1375 Objects: 4570 detected / 661 sextracted
> Line: 1400 Objects: 4638 detected / 706 sextracted
> Line: 1425 Objects: 4741 detected / 753 sextracted
> Line: 1450 Objects: 4835 detected / 793 sextracted
> Line: 1455 Objects: 4851 detected / 800 sextracted
> Line: 1475 Objects: 4933 detected / 831 sextracted
> Line: 1500 Objects: 5025 detected / 873 sextracted
> Line: 1525 Objects: 5102 detected / 908 sextracted
> Line: 1550 Objects: 5205 detected / 948 sextracted
> Line: 1575 Objects: 5301 detected / 997 sextracted
> Line: 1600 Objects: 5397 detected / 1034 sextracted
> Line: 1625 Objects: 5528 detected / 1087 sextracted
> Line: 1650 Objects: 5630 detected / 1130 sextracted
> Line: 1675 Objects: 5715 detected / 1174 sextracted
> Line: 1689 Objects: 5742 detected / 1200 sextracted
> Line: 1700 Objects: 5782 detected / 1216 sextracted
> Line: 1725 Objects: 5855 detected / 1261 sextracted
> Line: 1750 Objects: 5936 detected / 1299 sextracted
> Line: 1775 Objects: 5999 detected / 1340 sextracted
> Line: 1800 Objects: 6095 detected / 1373 sextracted
> Line: 1825 Objects: 6181 detected / 1405 sextracted
> Line: 1850 Objects: 6305 detected / 1443 sextracted
> Line: 1875 Objects: 6397 detected / 1478 sextracted
> Line: 1900 Objects: 6485 detected / 1521 sextracted
> Line: 1925 Objects: 6591 detected / 1562 sextracted
> Line: 1947 Objects: 6666 detected / 1600 sextracted
> Line: 1950 Objects: 6675 detected / 1604 sextracted
> Line: 1975 Objects: 6773 detected / 1645 sextracted
> Line: 2000 Objects: 6850 detected / 1674 sextracted
> Line: 2025 Objects: 6947 detected / 1712 sextracted
> Line: 2050 Objects: 7035 detected / 1746 sextracted
> Line: 2075 Objects: 7126 detected / 1792 sextracted
> Line: 2100 Objects: 7200 detected / 1835 sextracted
> Line: 2125 Objects: 7284 detected / 1879 sextracted
> Line: 2150 Objects: 7404 detected / 1919 sextracted
> Line: 2175 Objects: 7486 detected / 1966 sextracted
> Line: 2191 Objects: 7547 detected / 2000 sextracted
> Line: 2200 Objects: 7577 detected / 2015 sextracted
> Line: 2225 Objects: 7693 detected / 2064 sextracted
> Line: 2250 Objects: 7780 detected / 2118 sextracted
> Line: 2275 Objects: 7852 detected / 2166 sextracted
> Line: 2300 Objects: 7917 detected / 2216 sextracted
> Line: 2325 Objects: 7986 detected / 2260 sextracted
> Line: 2350 Objects: 8055 detected / 2316 sextracted
> Line: 2375 Objects: 8137 detected / 2369 sextracted
> Line: 2398 Objects: 8188 detected / 2400 sextracted
> Line: 2400 Objects: 8196 detected / 2404 sextracted
> Line: 2425 Objects: 8267 detected / 2457 sextracted
> Line: 2450 Objects: 8349 detected / 2500 sextracted
> Line: 2475 Objects: 8437 detected / 2551 sextracted
> Line: 2500 Objects: 8516 detected / 2598 sextracted
> Line: 2525 Objects: 8594 detected / 2637 sextracted
> Line: 2550 Objects: 8680 detected / 2683 sextracted
> Line: 2575 Objects: 8761 detected / 2744 sextracted
> Line: 2600 Objects: 8849 detected / 2794 sextracted
> Line: 2605 Objects: 8870 detected / 2800 sextracted
> Line: 2625 Objects: 8951 detected / 2849 sextracted
> Line: 2650 Objects: 9003 detected / 2898 sextracted
> Line: 2675 Objects: 9070 detected / 2941 sextracted
> Line: 2700 Objects: 9145 detected / 2995 sextracted
> Line: 2725 Objects: 9231 detected / 3039 sextracted
> Line: 2750 Objects: 9337 detected / 3085 sextracted
> Line: 2775 Objects: 9430 detected / 3130 sextracted
> Line: 2800 Objects: 9524 detected / 3177 sextracted
> Line: 2812 Objects: 9572 detected / 3200 sextracted
> Line: 2825 Objects: 9631 detected / 3224 sextracted
> Line: 2850 Objects: 9728 detected / 3269 sextracted
> Line: 2875 Objects: 9816 detected / 3324 sextracted
> Line: 2900 Objects: 9887 detected / 3368 sextracted
> Line: 2925 Objects: 9983 detected / 3422 sextracted
> Line: 2950 Objects: 10072 detected / 3476 sextracted
> Line: 2975 Objects: 10150 detected / 3521 sextracted
> Line: 3000 Objects: 10240 detected / 3568 sextracted
> Line: 3025 Objects: 10318 detected / 3596 sextracted
> Line: 3028 Objects: 10330 detected / 3600 sextracted
> Line: 3050 Objects: 10405 detected / 3630 sextracted
> Line: 3075 Objects: 10523 detected / 3667 sextracted
> Line: 3100 Objects: 10610 detected / 3697 sextracted
> Line: 3125 Objects: 10687 detected / 3742 sextracted
> Line: 3150 Objects: 10803 detected / 3782 sextracted
> Line: 3175 Objects: 10909 detected / 3831 sextracted
> Line: 3200 Objects: 11015 detected / 3864 sextracted
> Line: 3225 Objects: 11133 detected / 3902 sextracted
> Line: 3250 Objects: 11251 detected / 3946 sextracted
> Line: 3275 Objects: 11342 detected / 3980 sextracted
> Line: 3284 Objects: 11370 detected / 4000 sextracted
> Line: 3300 Objects: 11411 detected / 4030 sextracted
> Line: 3325 Objects: 11505 detected / 4068 sextracted
> Line: 3350 Objects: 11584 detected / 4114 sextracted
> Line: 3375 Objects: 11666 detected / 4151 sextracted
> Line: 3400 Objects: 11757 detected / 4194 sextracted
> Line: 3425 Objects: 11851 detected / 4233 sextracted
> Line: 3450 Objects: 11962 detected / 4282 sextracted
> Line: 3475 Objects: 12035 detected / 4325 sextracted
> Line: 3500 Objects: 12095 detected / 4373 sextracted
> Line: 3521 Objects: 12152 detected / 4400 sextracted
> Line: 3525 Objects: 12168 detected / 4413 sextracted
> Line: 3550 Objects: 12251 detected / 4457 sextracted
> Line: 3575 Objects: 12326 detected / 4498 sextracted
> Line: 3600 Objects: 12402 detected / 4544 sextracted
> Line: 3625 Objects: 12483 detected / 4584 sextracted
> Line: 3650 Objects: 12561 detected / 4614 sextracted
> Line: 3675 Objects: 12652 detected / 4651 sextracted
> Line: 3700 Objects: 12729 detected / 4687 sextracted
> Line: 3725 Objects: 12820 detected / 4726 sextracted
> Line: 3750 Objects: 12895 detected / 4761 sextracted
> Line: 3775 Objects: 12982 detected / 4790 sextracted
> Line: 3786 Objects: 13011 detected / 4800 sextracted
> Line: 3800 Objects: 13053 detected / 4816 sextracted
> Line: 3825 Objects: 13159 detected / 4847 sextracted
> Line: 3850 Objects: 13259 detected / 4883 sextracted
> Line: 3875 Objects: 13344 detected / 4928 sextracted
> Line: 3900 Objects: 13416 detected / 4960 sextracted
> Line: 3925 Objects: 13502 detected / 4995 sextracted
> Line: 3950 Objects: 13565 detected / 5028 sextracted
> Line: 3975 Objects: 13653 detected / 5050 sextracted
> Line: 4000 Objects: 13742 detected / 5090 sextracted
> Line: 4025 Objects: 13819 detected / 5120 sextracted
> Line: 4050 Objects: 13893 detected / 5165 sextracted
> Line: 4071 Objects: 13975 detected / 5200 sextracted
> Line: 4075 Objects: 13985 detected / 5206 sextracted
> Line: 4100 Objects: 14047 detected / 5242 sextracted
> Line: 4125 Objects: 14115 detected / 5279 sextracted
> Line: 4150 Objects: 14181 detected / 5314 sextracted
> Line: 4175 Objects: 14258 detected / 5346 sextracted
> Line: 4200 Objects: 14329 detected / 5383 sextracted
> Line: 4225 Objects: 14391 detected / 5437 sextracted
> Line: 4250 Objects: 14473 detected / 5480 sextracted
> Line: 4275 Objects: 14525 detected / 5508 sextracted
> Line: 4300 Objects: 14599 detected / 5538 sextracted
> Line: 4325 Objects: 14668 detected / 5577 sextracted
> Line: 4342 Objects: 14720 detected / 5600 sextracted
> Line: 4350 Objects: 14735 detected / 5615 sextracted
> Line: 4375 Objects: 14804 detected / 5662 sextracted
> Line: 4381 Objects: 14858 detected / 6000 sextracted
> Line: 4381 Objects: 14858 detected / 6400 sextracted
> Line: 4381 Objects: 14858 detected / 6800 sextracted
> Line: 4381 Objects: 14858 detected / 7200 sextracted
Objects: detected 14858 / sextracted 7243
> Closing files
>
> All done (in 3.6 s: 1228.1 lines/s , 2030.4 detections/s)
0
3. Reading the Data#
colnames = ['x','y','num','mag','merr','kron','backgr','ra','dec',
'a','b','theta','mu0','flag','fwhm','flxrad','cl']
dat_V = np.genfromtxt(cat_name[0], dtype=None, encoding='ascii', names=colnames)
dat_I = np.genfromtxt(cat_name[1], dtype=None, encoding='ascii', names=colnames)
pd.DataFrame(dat_V).head(5)
| x | y | num | mag | merr | kron | backgr | ra | dec | a | b | theta | mu0 | flag | fwhm | flxrad | cl | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1911.3966 | 731.6298 | 1 | 21.6796 | 0.0016 | 3.50 | 0.008239 | 109.418494 | 37.714342 | 19.341 | 17.625 | 0.44 | 20.1833 | 2 | 9.84 | 15.628 | 0.029 |
| 1 | 5889.4160 | 712.3062 | 2 | 25.0555 | 0.0258 | 5.06 | 0.000524 | 109.376589 | 37.714185 | 38.850 | 2.450 | -79.75 | 24.3301 | 19 | 58.57 | 90.367 | 0.000 |
| 2 | 4584.9277 | 434.9285 | 3 | 21.8951 | 0.0017 | 3.50 | 0.004010 | 109.390331 | 37.711874 | 21.432 | 12.511 | 72.92 | 19.8551 | 0 | 13.37 | 10.840 | 0.029 |
| 3 | 2690.8933 | 337.5047 | 4 | 23.0958 | 0.0032 | 3.50 | 0.001310 | 109.410282 | 37.711060 | 15.863 | 6.663 | -87.72 | 20.8277 | 0 | 8.63 | 9.864 | 0.029 |
| 4 | 1297.1003 | 281.1276 | 5 | 21.8859 | 0.0022 | 3.50 | 0.008271 | 109.424964 | 37.710586 | 33.888 | 13.639 | -61.65 | 21.7182 | 0 | 111.26 | 27.440 | 0.001 |
pd.DataFrame(dat_I).head(5)
| x | y | num | mag | merr | kron | backgr | ra | dec | a | b | theta | mu0 | flag | fwhm | flxrad | cl | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1911.3966 | 731.6298 | 1 | 20.1743 | 0.0004 | 3.50 | 0.016663 | 109.418494 | 37.714342 | 19.341 | 17.625 | 0.44 | 18.7318 | 2 | 10.11 | 16.040 | 0.029 |
| 1 | 5889.4160 | 712.3062 | 2 | 24.5670 | 0.0139 | 5.06 | 0.000402 | 109.376589 | 37.714185 | 38.850 | 2.450 | -79.75 | 23.9554 | 19 | 58.57 | 40.278 | 0.000 |
| 2 | 4584.9277 | 434.9285 | 3 | 20.5084 | 0.0004 | 3.50 | 0.007200 | 109.390331 | 37.711874 | 21.432 | 12.511 | 72.92 | 18.6067 | 0 | 13.36 | 12.136 | 0.029 |
| 3 | 2690.8933 | 337.5047 | 4 | 21.7658 | 0.0008 | 3.50 | 0.001527 | 109.410282 | 37.711060 | 15.863 | 6.663 | -87.72 | 19.4696 | 0 | 8.54 | 9.882 | 0.029 |
| 4 | 1297.1003 | 281.1276 | 5 | 21.3095 | 0.0011 | 3.50 | 0.008162 | 109.424964 | 37.710586 | 33.888 | 13.639 | -61.65 | 20.9812 | 0 | 73.93 | 26.175 | 0.029 |
4. Plotting the Figures#
0) Check image - APERTURES#
hdu_606_check = fits.open('./606_aper.fits')
hdu_814_check = fits.open('./814_aper.fits')
interval = ZScaleInterval()
vmin_606_check, vmax_606_check = interval.get_limits(hdu_606_check[0].data)
vmin_814_check, vmax_814_check = interval.get_limits(hdu_814_check[0].data)
fig, axes = plt.subplots(2,1, figsize=(10, 15))
axes[0].imshow(hdu_606_check[0].data, vmin=vmin_606_check, vmax=vmax_606_check)
axes[0].set_title('CHECKIMAGE_TYPE: APERTURES [F606W]')
axes[1].imshow(hdu_814_check[0].data, vmin=vmin_814_check, vmax=vmax_814_check)
axes[1].set_title('CHECKIMAGE_TYPE: APERTURES [F814W]')
plt.show()
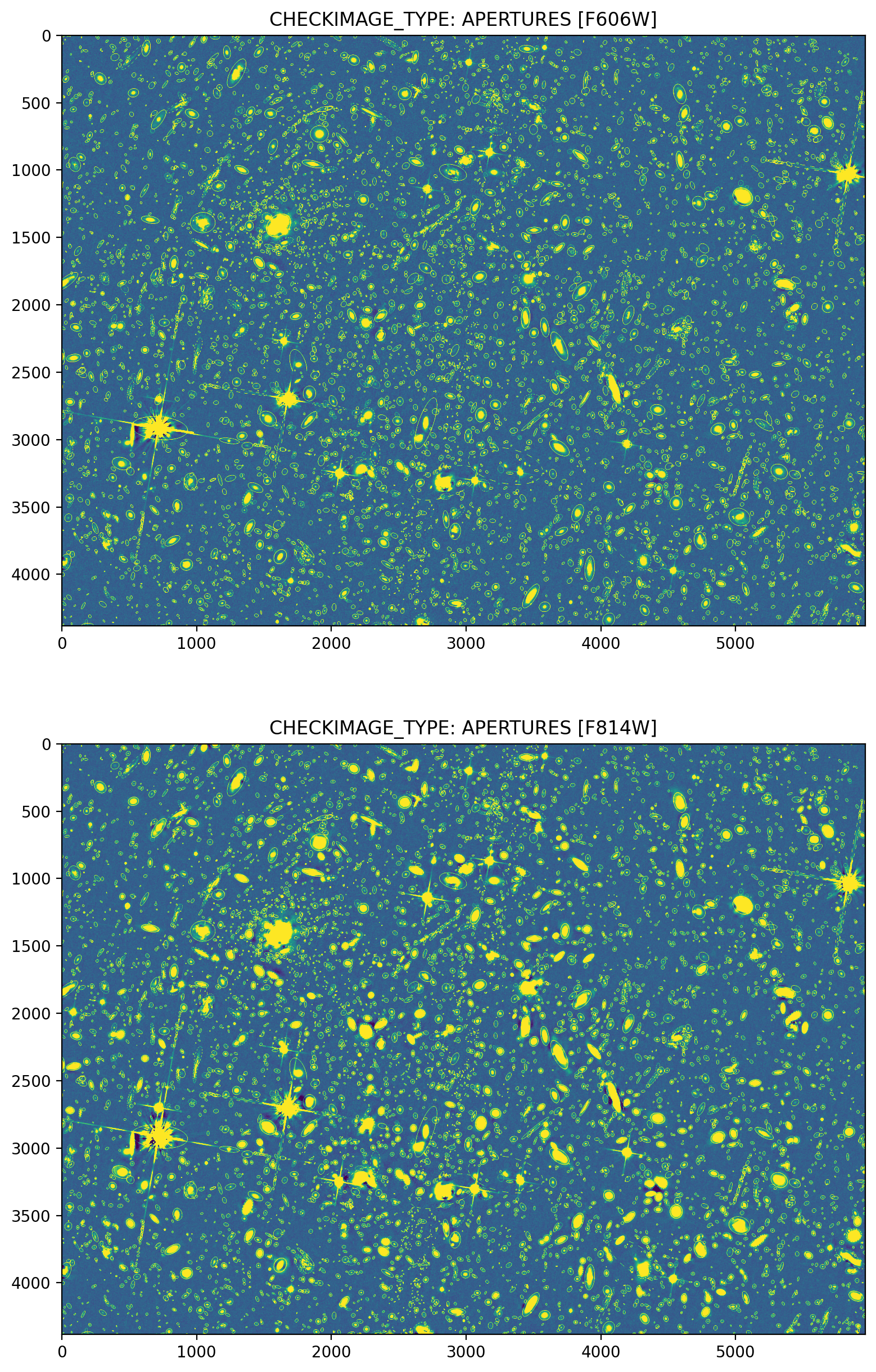
dat = [dat_V, dat_I]
1) Magnitude - magnitude error diagram#
xlab = ["F606W magnitude", "F814W magnitude"]
ylab = ["Magnitude error"]
fig, axs = plt.subplots(1, 2, figsize=(9,4))
for i, ax in enumerate(axs):
mag_range = (dat[i]['mag'] < 99.0)
# magnitude of 99.0 means the source not detected in the 606-band image but detected in the 814-band image.
ax.plot(dat[i]['mag'][mag_range], dat[i]['merr'][mag_range], 'o', ms=1)
ax.set_xlim([12.5, 32.5])
ax.set_ylim([0.0, 0.6])
ax.set_xlabel(xlab[i])
ax.set_ylabel(ylab[0])
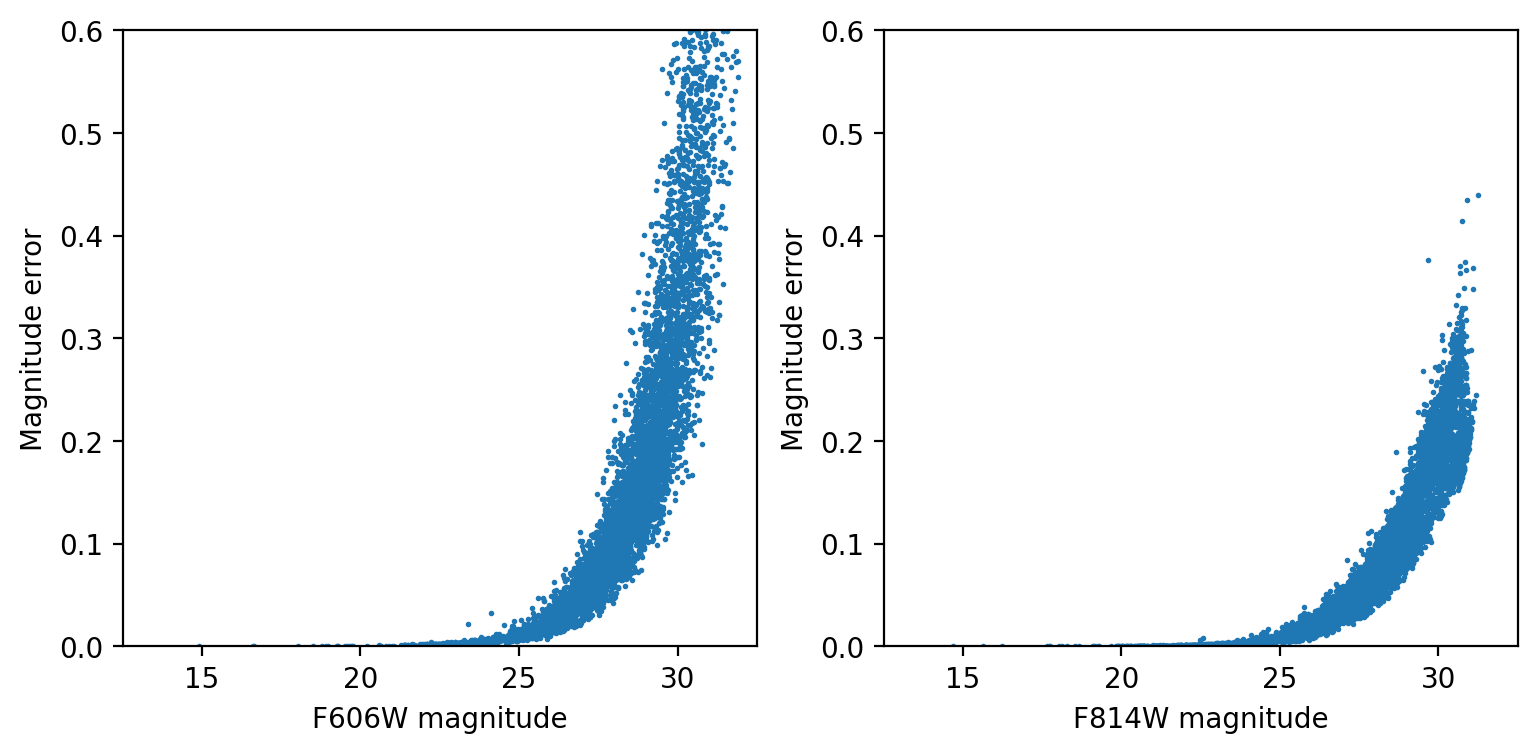
2) Magnitude - stellarity (CLASS_STAR) digram#
xlab = ["F606W magnitude", "F814W magnitude"]
ylab = ["Stellarity (CLASS_STAR)"]
fig, axs = plt.subplots(1, 2, figsize=(9,4))
for i, ax in enumerate(axs):
mag_range = (dat[i]['mag'] < 99.0)
# magnitude of 99.0 means the source not detected in the 606-band image but detected in the 814-band image.
ax.plot(dat[i]['mag'][mag_range], dat[i]['cl'][mag_range], 'o', ms=1)
ax.axhline(0.4, 0, 1, color='red', ls='--', lw=1)
ax.axhline(0.8, 0, 1, color='red', ls='--', lw=1)
# CLASS_STAR = 0.4 cut can also depend on the image quality, distribution of CLASS_STAR, or your scientific goals!
ax.set_xlim([12.5, 32.5])
ax.set_ylim([0.0, 1.0])
ax.set_xlabel(xlab[i])
ax.set_ylabel(ylab[0])
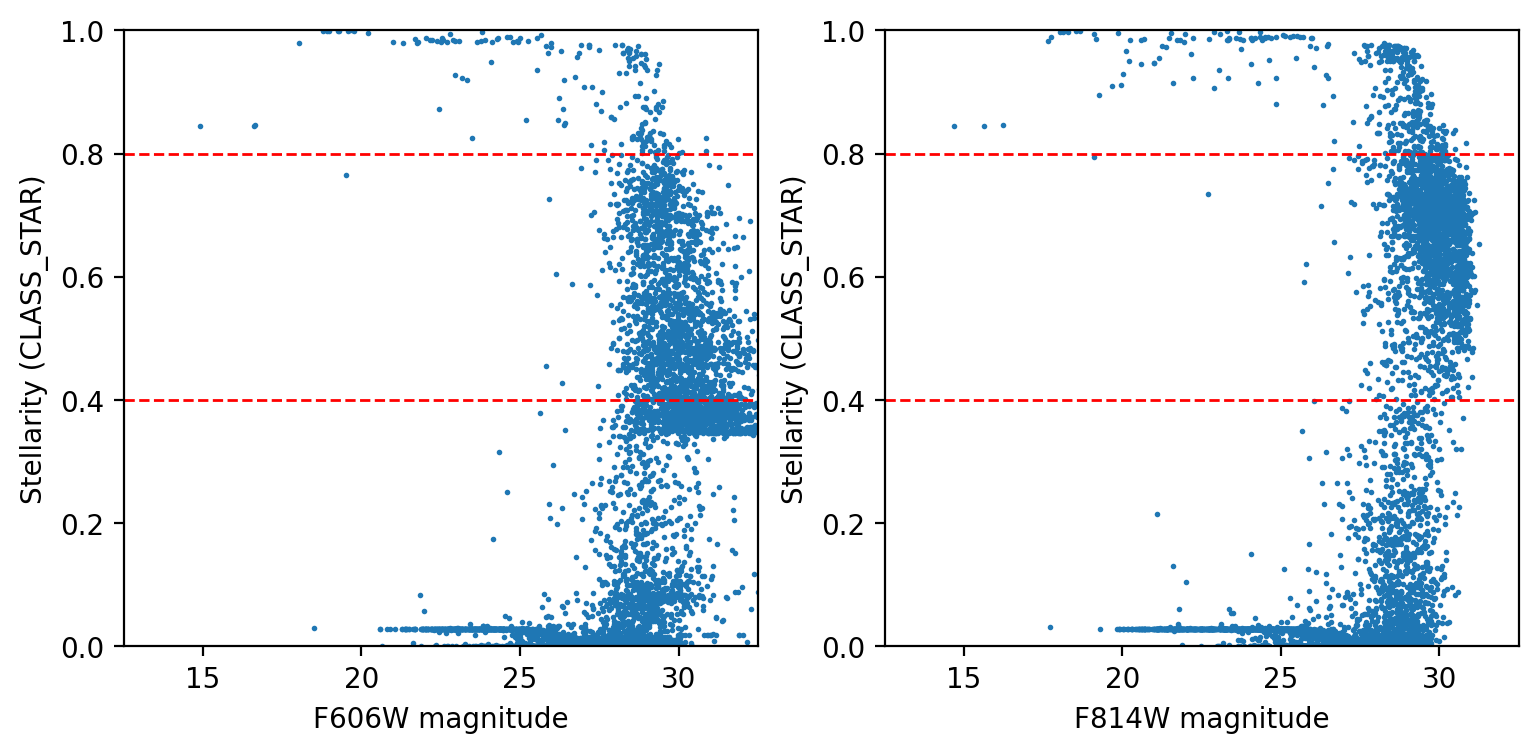
From the above basic results, how can you select point/extended sources for analysis?
3) CMDs of galaxies (just for example!)#
gal_cnd = ((dat_V['mag'] < 30.0) & (dat_V['merr'] < 0.5) & (dat_I['mag'] < 30.0) & (dat_I['merr'] < 0.5) & \
(dat_V['flxrad'] > 4.) & (dat_V['fwhm'] > 4.) & (dat_I['flxrad'] > 4.) & (dat_I['fwhm'] > 4.) & \
(dat_V['mag']-dat_I['mag'] > -1.0) & (dat_V['mag']-dat_I['mag'] < 2.0) & \
(dat_I['cl'] < 0.4))
xlab = ["F606W-F814W"]
ylab = ["F814W magnitude"]
fig, ax = plt.subplots(1, 1, figsize=(5,5))
ax.plot(dat_V['mag'][gal_cnd]-dat_I['mag'][gal_cnd], dat_I['mag'][gal_cnd], 'o', ms=1)
# ax.axhline(0.4, 0, 1, color='red', ls='--', lw=1)
# # CLASS_STAR = 0.4 cut can also depend on the image quality, distribution of CLASS_STAR, or your scientific goals!
ax.set_xlim([-1.0, 2.0])
ax.set_ylim([30.0, 17.0])
ax.set_xlabel(xlab[0])
ax.set_ylabel(ylab[0])
Text(0, 0.5, 'F814W magnitude')